
為確保美國陸軍在二十一世紀取得成功,其重點培訓官兵理解并運用任務式指揮。任務式指揮賦能各級領導者,使其能夠同步所有作戰職能與信息系統,從而在面對各類對手時奪取、保持并利用主動權。本歷史案例集通過提供過往任務式指揮原則起決定性作用的實例,旨在深化我們對任務式指揮哲學與實踐的理解。部分案例展現初級軍官在極端混亂的作戰行動中遵循指揮官意圖并發揮受約束主動性的經歷;其他案例則記述戰地軍官如何構建依賴互信凝聚的團隊以實現關鍵作戰目標。
2012年,美國陸軍正式頒布關于任務式指揮的新條令,該指揮哲學與實踐構成聯合地面作戰基礎。條令將任務式指揮定義為“指揮官運用任務指令行使權力與指導,使下屬能在指揮官意圖范圍內發揮受約束主動性,從而賦能敏捷適應型領導者實施聯合地面作戰”。為提供任務式指揮實踐框架,該條令確立六項原則:
通過互信構建凝聚型團隊
創造共同理解
提供清晰的指揮官意圖
行使受約束主動性
使用任務指令
接受謹慎風險
此后不久,陸軍開始集中開展任務式指揮教育與訓練,以培養領導者應對尚未顯現的不可預測復雜沖突。2013年初,戰斗研究學院通過為波爾克堡聯合戰備訓練中心編寫系列任務式指揮案例參與此項工作。這些案例構成本合集的核心內容。每個案例包含軍事行動簡要敘述及解釋性章節,闡明案例如何體現任務式指揮原則。該結構專為訓練與院校教學設計,但同樣適用于自學計劃。
本卷十六個案例均未展示領導者完美實踐任務式指揮的范例。所述某些行動甚至來自早期階段——當時無線電與其他現代通信手段的缺失使得任何層級的指揮控制都難以實現。這些案例的真正價值在于能清晰傳遞歷史領導者如何運用諸如指揮官意圖與受約束主動性等原則來奪取、保持并利用主動權。由此,歷史為現行條令注入生命力,使其更具體、更可理解。

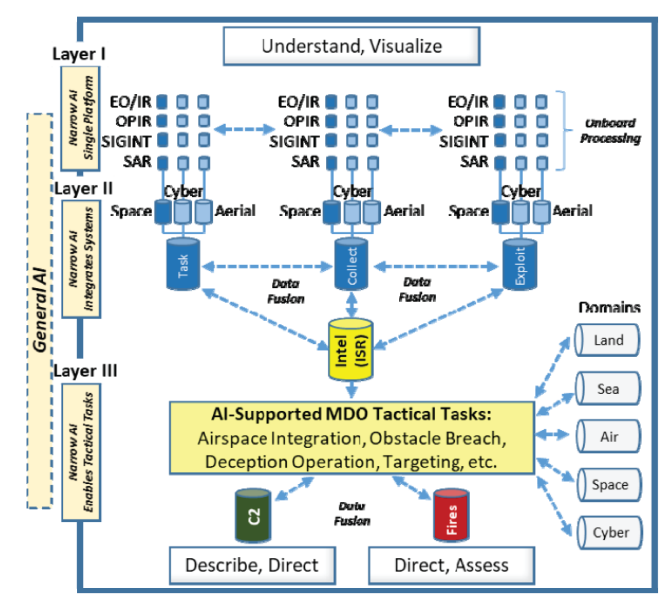
近二十年來,作戰范式已發生顯著變化,軍事行動不再局限于空中、陸地與海上領域。對手正積極拓展網絡安全領域,力圖在戰略競爭或沖突中挑戰軍事力量。這種跨域作戰模式被定義為"多域作戰"范式。在多域作戰行動實施過程中,目標定位流程用于鎖定敵對目標并獲取戰場優勢。作為目標定位流程的核心環節,指揮員及其參謀團隊需對不同交戰方案(即行動方案)進行評估比較。該評估比較采用軍事決策流程方法實施,旨在幫助指揮體系深化任務理解并最終確定最優行動方案。需特別說明的是,由于指揮員主要依據個人經驗知識進行判斷,交戰方案評估本質是主觀決策過程。
前期研究成果表明,雖已開發多種技術支持行動方案比較流程,但決策者無法掌握這些模型的內在機理。這導致用戶難以理解模型原理并正確運用。相較之下,非軍事領域應用的貝葉斯網絡模型具備可解釋性與透明性優勢。該模型通過表征變量間因果關系并整合決策過程的不確定性來實現這一特性。
本研究綜合運用科學理論與軍事條令,確立多域作戰行動方案評估指標體系。為構建貝葉斯網絡分析框架,創建有向無環圖形式的因果圖結構,清晰呈現各指標間因果關系。采用點分配法為貝葉斯模型各節點配置條件概率表,其權重賦值基于俄烏戰爭真實戰例數據。當選定特定行動方案時,本模型可展示該選擇對各評估指標的影響程度,為行動方案分析及決策過程提供支持。需說明本模型不具備多方案直接對比功能,僅呈現單一方案選擇的影響效應。
通過構建三個基于俄烏戰爭事件的推演想定,對本模型進行驗證。推演結果表明該模型適用于軍事領域,其透明化特性便于用戶理解與正確運用,使決策者能更充分考慮多域作戰中的人因要素。本模型仍存在功能局限,文末提出改進建議與未來研究方向。
后續結構如下:第二章闡述本研究所涉主題的背景知識;第三章說明實現研究目標的技術路徑;第四章綜述軍事及其他領域人工智能技術應用的文獻研究;第五章解析多域作戰框架下的行動方案定義、模型評估指標體系、表征指標關系的因果圖及模型實施方法;第六章呈現基于俄烏戰爭實況數據的推演想定設計、想定選擇流程、模型輸出的方案選擇影響結果及其作戰含義解讀;第七章闡明各子研究問題的結論、核心研究問題的解答、當前研究的局限性以及未來可能的研究方向。
及時全面理解新興事件對有效決策至關重要;自動化態勢報告生成能顯著減少情報分析師的時間、精力與成本。本工作識別了情報分析師在態勢報告生成中對AI輔助的實踐與偏好,以指導設計符合其思維過程與需求的有效、建立信任的界面策略。繼而,本文介紹智能書(SmartBook)——一個從海量新聞數據自動生成態勢報告的框架,通過自動發現事件相關戰略問題構建結構化報告。這些報告包含多個假設(主張),均基于來源進行摘要并輔以事實證據,以促進深度態勢理解。本文對智能書進行的綜合評估(含用戶研究及結合編輯研究的內容評審)揭示了其在生成準確相關態勢報告方面的有效性。定性評估表明超過80%的問題探查戰略信息,超過90%的摘要產出戰術實用內容,其表現持續優于結合網絡搜索的大語言模型生成摘要。編輯研究顯示生成文本的信息刪除量極低(低于2.5%),表明智能書為分析師提供了有價值的態勢報告基礎。
在當今快速變化的世界中,情報分析師面臨持續挑戰:需在新聞、謠言與演變敘事的海量涌入中保持信息同步。為理解動態事件,必須從異構數據源提取共同真相。目前,情報分析師編寫態勢報告以提供事務概述、潛在風險或威脅及視角,并附指導行動規劃與戰略發展的建議措施(Organization等人,2020年,2022年)。態勢報告需以清晰邏輯結構呈現關鍵事件與趨勢的突出信息,便于理解、跟蹤及便捷獲取。這些報告的下游消費者(公眾、決策者與利益相關方)不僅尋求原始信息,更追求清晰度、背景與可行動見解。然這些手動編制的報告存在局限:耗時產生(National Academies of Sciences等人,2019年)、可能呈現偏見(Castonguay,2013年;Belton與Dhami,2020年)、事實錯誤(Sun等人,2024年),且因需處理信息量巨大而受限(Doggette等人,2020年;Young,2019年)。情報分析師花費大量時間篩選龐大復雜數據源(Golson與Ferraro,2018年;Council等人,2011年)(如社交媒體謠言傳播、新聞爆發、背景統計數據、領域專家意見等),讀者常苦于信息過密或不夠全面。鑒于信息量巨大,分析師難以進行深度分析與批判性思考以制定戰略問題并生成見解。我們假設自動態勢報告生成可彌合閱讀與撰寫情報信息間的差距。然現有摘要方法(Fabbri等人,2019年;Abdi等人,2017年;Li等人,2014年)生成純文本,未提供細節、結構及高層戰略信息以支持下游消費者決策。尤其當前基于大語言模型的方法(如GPT-4/ChatGPT(OpenAI,2021年))可能因未實時更新信息且缺乏事實核查機制而無法回答或錯誤回答用戶問題(例如表1)。
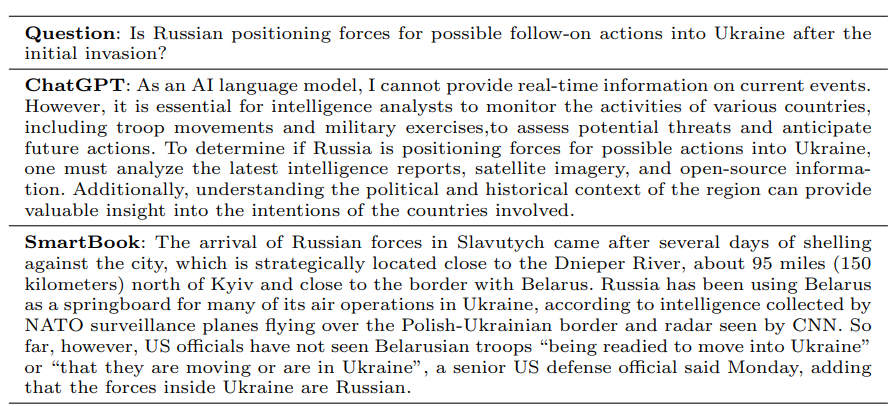
表1:基于GPT-4的ChatGPT無法生成態勢報告,因其對實時事件的認知存在局限。相較之下,SmartBook能夠生成及時、多源且可信的應答。
為建立自動生成態勢報告的基礎,開展形成性研究(見§2.1.1)以把握情報分析師對AI驅動系統的期望。研究發現表明分析師對AI輔助持開放態度,尋求AI操作透明性,且對控制系統欲望各異。為理解態勢報告編制過程,通過協作設計會話(見§2.1.2)增強初始研究結果,旨在確定實用設計策略與建議,尤其關注人類情報分析師如何導航、研究與撰寫報告。高層級上,我們推斷系統界面須在視覺上對齊分析師順序思維過程,提供信息流透明度以建立信任,并使分析師對AI工具流程擁有一定控制權。這些結論由此指導了自動化態勢報告生成的設計策略。
基于形成性研究與協作設計所奠定的基礎,提出智能書(SmartBook)——一個旨在輔助編寫態勢報告的人類分析師的框架。智能書從多源攝取數據以生成信息定期更新的綜合報告。人類分析師通常基于自身對態勢的理解提出問題以獲取信息。然這些問題可能靜態或過于模糊,并隨態勢快速演變而過時。相較之下,智能書自動發現對態勢分析重要的問題并收集突出信息以生成報告。針對重大事件的所有問題,報告包含源自相關主張的戰術信息摘要,并附局部背景及源新聞文章鏈接。智能書以映射當前情報分析師工作流的方式構建數據——將事件分解為時間線、章節及基于問題的部分。每部分含基于查詢的接地氣摘要及其相關主張。此直觀結構便于閱讀與寫作時更易吸收信息。采用以人為本的設計方法,我們的目標是增強而非取代人類分析師能力。圖1展示智能書針對烏俄危機的示例,呈現時間跨度、章節及對應部分的結構化層級。
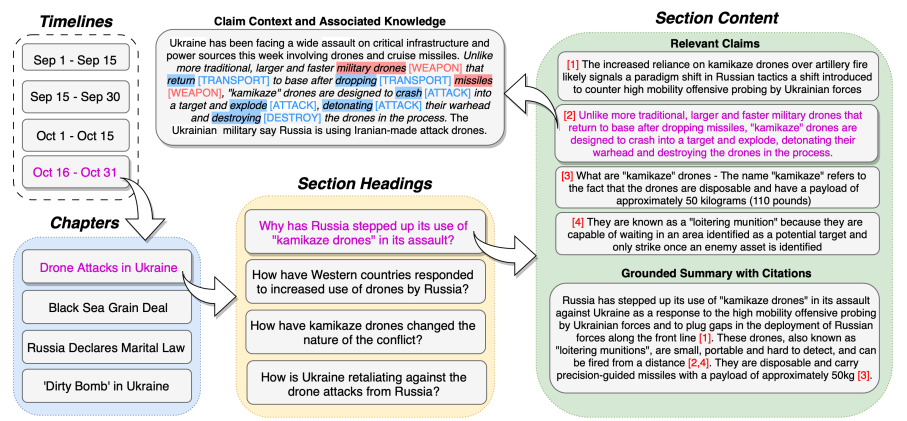
圖1. 智能書針對烏俄危機的示例圖。智能書按時間線組織,以兩周為時間跨度包含章節與對應部分。部分標題為戰略問題,每部分內容由摘要及相關主張鏈接組成,其中事實證據與知識要素均被高亮。斜體實體與事件(構成關聯知識要素)分別以紅色與藍色高亮。
在對智能書的綜合評估中,我們開展兩項互補研究:效用研究(§3.1)評估可用性與交互,內容評審(§3.2)檢驗文本摘要質量。涉及情報分析師與決策者的用戶研究聚焦關鍵研究問題,探索智能書在態勢報告生成中的可用性、直觀性與有效性。參與者參與半結構化訪談與研究后問卷,反思系統使用體驗。內容評審通過評估智能書生成報告的可讀性、連貫性與相關性予以補充,包括由專家分析師修訂摘要以符合其可接受標準的編輯研究。此過程主要目標為評估將智能書用作創建態勢報告初步草稿工具的可行性。結果表明智能書生成內容大多準確,僅需少量編輯修正部分事實錯誤。然編輯過程大部分精力集中于添加證據支持摘要。編輯研究結果提示,盡管智能書提供堅實基礎,其顯著受益于人工優化。本工作貢獻如下:
? 一項綜合形成性研究與協作設計過程,用于識別指導自動生成態勢報告的設計策略。
? 智能書(SmartBook):一個從多源生成全面最新態勢報告并以直觀用戶友好方式呈現的自動化框架。其識別關鍵戰略問題,確保下游讀者獲得針對性、相關且證據扎實的信息以輔助決策過程。
? 一項涉及情報分析師與決策者的全面效用評估,探究系統可用性。
? 一項內容評審用于評定生成信息質量,輔以編輯研究理解智能書生產態勢報告初步草稿的可行性。
SmartBook框架
2.1 系統設計
SmartBook(一種用于生成態勢報告的AI驅動系統)的開發遵循迭代式以人為本的設計方法。初始階段側重于設計和開發后端工作流程以及初步前端界面,并包含多個評估階段。在此過程中,向政府和私營部門的利益相關者進行了多次演示,獲得了寶貴的反饋。第二階段通過形成性研究和協作設計研究讓情報分析師和決策者參與進來,以更好地了解他們的需求和期望。形成性研究階段(§2.1.1)涉及半結構化訪談,以收集用戶的見解,包括對AI系統期望的詳細分析。隨后,協作設計階段(§2.1.2)將用戶和開發者聚集在一起,以完善和驗證初始設計概念。通過互動環節,參與者對原型功能提供了實時反饋,以獲取AI輔助報告生成的精確需求。這些努力的成果是一套設計策略,確保SmartBook采用以用戶為中心的設計,服務于情報分析師的實際需求。
2.1.1 形成性研究
形成性研究旨在收集情報分析師對AI驅動系統的普遍需求和期望。該研究針對十名具有政府和軍事角色經驗的情報分析師進行(招募細節見補充材料§4.1)。在兩周的時間內,對這些分析師進行了半結構化訪談,以考察他們對AI在專業環境中使用的理解、觀點和建議。該研究突出了與分析師對AI輔助創作工具的看法和期望相關的新興主題,簡要描述如下:
? 將技術視為增強人類能力的手段:絕大多數(10人中的9人)強調AI在增強其能力方面的關鍵作用,這些工具不僅被視為流程加速器,而且是通過提高研究效率、激發想法和提升信息清晰度來豐富其工作的基本要素。這種觀點與媒體將這些技術簡單描述為人類努力的替代品形成對比。
? 像信任和依賴人類一樣信任和依賴機器:大多數參與者(10人中的8人)表現出將類似人類的信任和可靠性品質賦予AI系統的傾向。信任AI的標準與人類互動的標準非常相似:提供可靠信息的能力、推理的透明度以及基于可驗證事實的基礎。有趣的是,分析師并未對AI設定比人類同事更高的標準。這種信任和可靠性標準的對等性表明,參與者將AI視為平等的協作伙伴,依據與人類團隊成員相同的理由評估其能力和可信度。
? 訓練和指導AI:我們的研究發現情報分析師在他們在培訓和指導AI系統方面的角色觀點上存在分歧。十名參與者中有四人主張對AI擁有實質性控制權,強調需要一個交互式系統,允許他們影響從信息源選擇到報告敘事塑造的一切。相反,大多數人(十人中的六人)傾向于更放手的方法,強調態勢報告的創建遵循適合AI實施的完善、標準化程序。他們將AI參與視為日常監督的延伸,類似于審閱初級同事的工作。
2.1.2 協作設計
為了獲得對情報分析過程和生成態勢報告的操作性理解,我們通過與十名分析師的后續協作設計會議,擴展了形成性研究(§2.1.1)中確定的設計機會。目標是獲取用戶關于他們作為情報分析師如何導航、研究和撰寫態勢報告的具體設計策略和建議。
我們與分析師進行了研究會議,每次會議包括使用故事板進行工作流程審查和通過模擬報告練習進行動手培訓。在我們的研究中,參與者使用一個低保真故事板(如圖2所示)進行互動,每個面板描繪了態勢報告創建的不同階段。參與者的任務是詳細描述每個故事板面板,以確保對所描繪場景和工作流程的理解。參與者使用樣本情境模擬每個故事板步驟以獲得實際工作流程經驗,并被建議利用多樣化的資源,包括如Google和Bing等網絡搜索引擎,以及如ChatGPT(Achiam等人,2023年)等大語言模型(LLM)來完成任務。 協作設計會議的數據分析顯示了三個主題:提升分析效率、AI系統透明度和定制靈活性。參與者強調需要反映其心智模型的界面,以減輕認知負荷,使他們能夠專注于戰略方面。他們非常重視理解AI系統的底層邏輯以建立信任,傾向于采用透明的方法和可追溯的數據源來驗證自動化輸出的可信度。此外,用戶表達了對支持不同分析風格和復雜性、并能整合來自不同來源的信息以提供全面分析的工具的渴望。
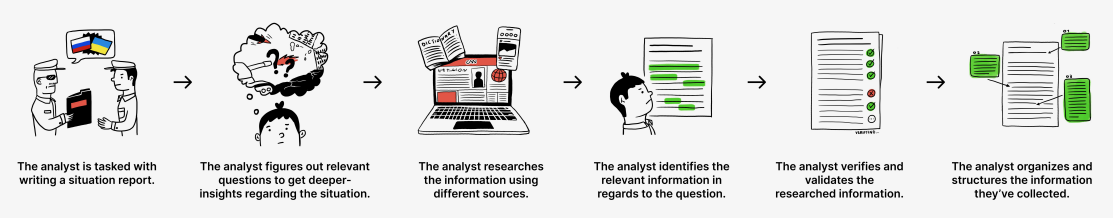
圖2. 與情報分析師進行協作設計會議時使用的故事板。
根據上述形成性研究和協作設計的發現,我們確定了以下設計策略:
? DS1:鑒于對減輕認知負荷和提升分析效率的重視,系統將設計一個能反映情報分析師數據分析和報告生成自然過程的界面。
? DS2:為了提高效率,系統將集成功能以自動化耗時任務,如問題策劃和初步研究,從而減少分析師的手動工作量,使其更能專注于戰略分析和決策。
? DS3:設計將滿足對信任和可靠性的需求,清晰解釋系統的數據處理算法和標準。這包括透明的數據溯源、在報告中提供參考文獻,以及使用戶能夠輕松理解和驗證系統結論的工具。該設計還將通過隨時間推移一致且經過驗證的性能來促進漸進式信任建立。
? DS4:針對定制化和靈活性的主題,系統將提供高度的適應性,以適應各種分析風格和報告詳細程度。它將包括調整分析深度、關注特定數據集以及無縫集成各種數據源的功能。
2.2 系統架構
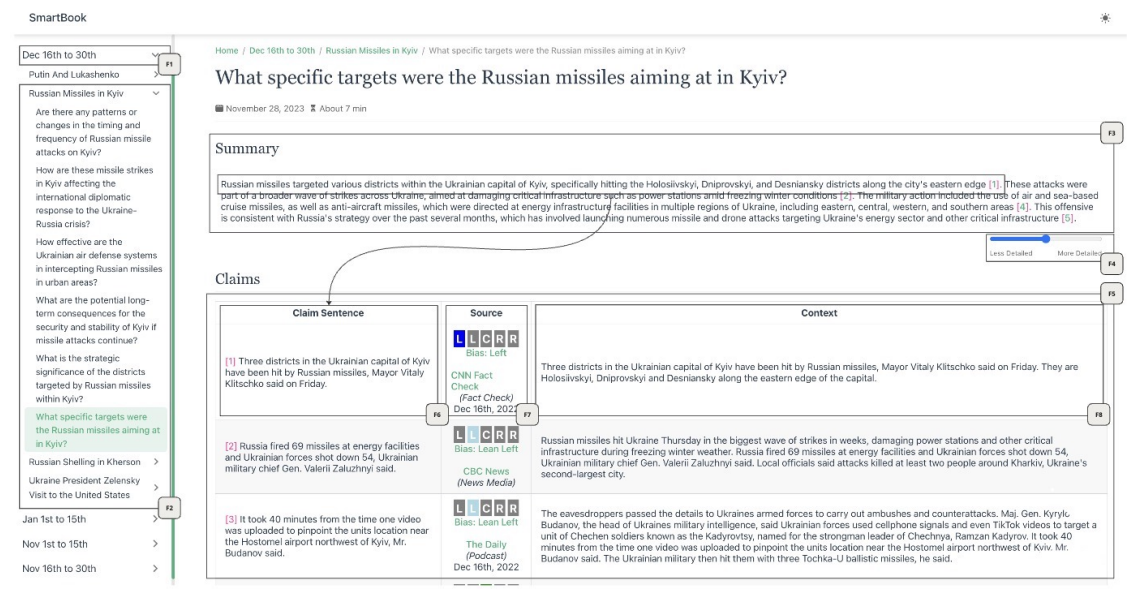
圖3. SmartBook前端界面截圖。在給定情境下,用戶可以導航時間線(F1)、探索與事件相關的戰略問題(F2)、閱讀給定戰略問題的總體摘要(F3)、控制信息的深度和長度(F4)、調查摘要中的所有主張(F5)、追蹤每個主張到相應的摘要片段(F6)、調查源元數據(F7)以及閱讀提取主張的上下文(F8)。
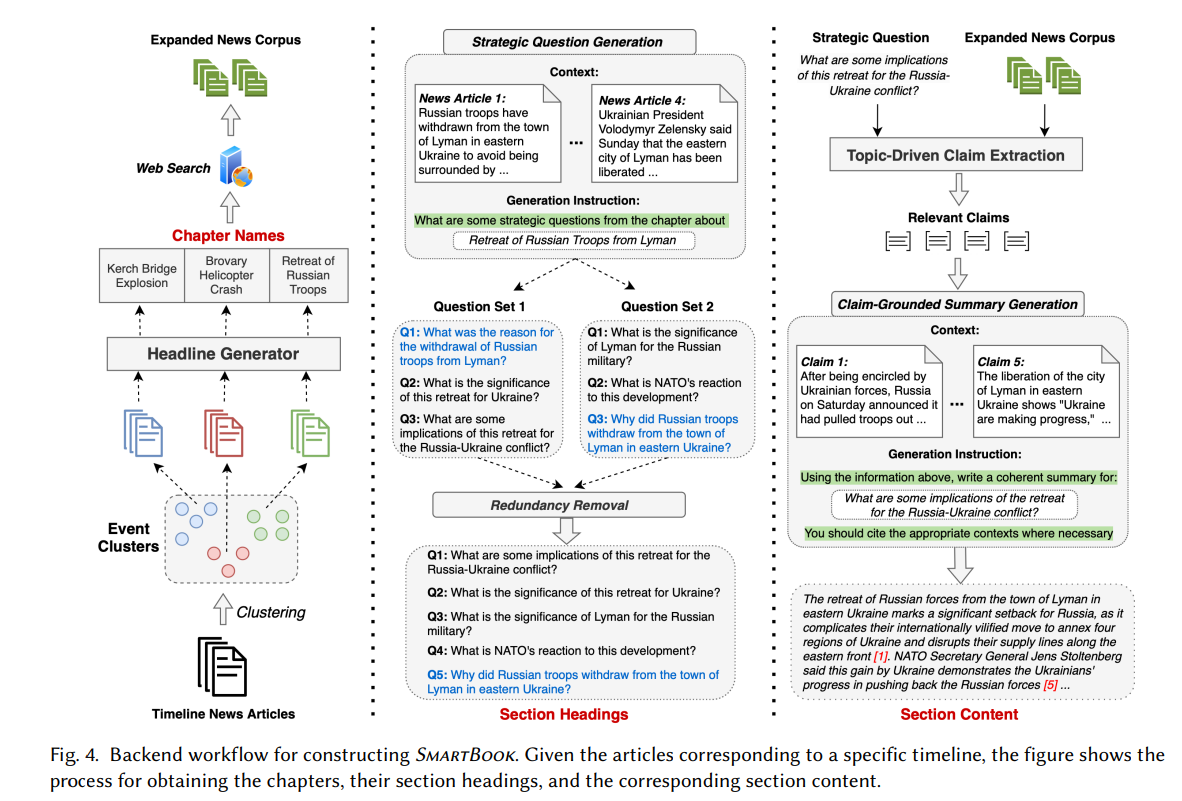
圖4. 構建SmartBook的后端工作流程。給定對應特定時間線的文章,該圖展示了獲取章節、其章節標題及相應章節內容的過程。
上述四項設計策略助力塑造了SmartBook——一個為態勢報告生成提供人工智能輔助的系統,旨在為分析師在處理新興事件的時效性信息需求時提供可基于其開展工作的初版報告。SmartBook包含:1) 一個直觀的用戶界面(如圖3所示),其設計策略源自§2.1.2;2) 一個后端框架(如圖4所示),當給定來自各類新聞源的文件集合時,它能自動生成態勢報告。
自動態勢報告被組織成連貫的、按時間順序排列的時間線,每條時間線跨度兩周,以增強對事件發展的跟蹤與理解。在這些時間線內,通過聚類新聞文章識別主要事件,形成后續章節的基礎(見§2.2.1)。為引導詳細的章節分析,我們采用了一種邏輯結構,以戰略問題的形式自動生成章節標題,涵蓋每個主要事件的各個方面(細節見§2.2.2)。SmartBook通過精準定位新聞文章中的相關主張(見§2.2.3),從戰略視角生成內容以回應這些問題。每個章節包含聚焦查詢的摘要以回答戰略問題,提供事件背景與影響的全面視圖(見§2.2.4)。這些摘要包含引文鏈接,便于專家進行事實核查與交叉驗證。
SmartBook為效率而設計,對已有訓練數據的任務(如事件標題生成、重復問題檢測和主張提取)利用較小模型(Liu等人,2019年;Lewis等人,2020年)。相反,對于更復雜的任務——例如生成帶引用的長文本摘要或識別戰略問題,我們采用大語言模型(OpenAI,2021年;Achiam等人,2023年)。本節描述SmartBook內的各個組件,并強調SmartBook設計各個方面對用戶(即情報分析師)和最終SmartBook報告接收者(即決策者,他們既是信息需求的發起者也是下游讀者)的優勢。
2.2.1 時間跨度內的主要事件作為章節
態勢報告覆蓋相當長時期的事件進展。因此,以時間線形式(圖3中的F1)組織此類報告是有益的,這支持無縫更新報告(Ma等人,2023年)以納入新事件,并有助于促進(Singh等人,2016年)用戶跟蹤和理解情境背景(基于DS1)。時間線通過按時間順序組織事件并突出因果關系,輔助情報分析師理解事件進展并預測未來趨勢。對于讀者,尤其是不太熟悉該主題的讀者,時間線提供了視覺指南,便于掌握場景中事件的順序和重要性。我們的自動態勢報告采用時間線以提供事件發展的連貫、時序化表征(DS1, DS2)。
在每個時間跨度內,首先使用基于詞頻-逆文檔頻率(TF-IDF)得分(Sparck Jones,1972年)的凝聚層次聚類算法(Jain和Dubes,1988年),將期間內的每日新聞摘要聚類成主要事件組,從而識別主要事件。最終,我們得到新聞片段簇,每個簇提供對一個主要事件的聚焦視圖。然而,由于新聞摘要片段細節凝練,我們通過擴展新聞語料庫來提升每個事件簇的全面性,如下所述。首先,為創建SmartBook的章節名稱并將其用于額外新聞文章檢索,為每個事件簇生成一個簡潔標題。為此,我們利用一個基于序列到序列轉換器(Vaswani等人,2017年)的語言模型BART(Lewis等人,2020年),該模型將事件簇內所有新聞片段的標題和文本拼接作為輸入,并生成一個簡短的事件標題。我們使用了在NewsHead數據集(Gu等人,2020年)上訓練的模型來生成多文檔標題。該數據集中,每個簇包含最多五篇新聞文章,一個人群源標題(最多35個字符)描述了該簇的主要信息。然后,我們使用這些章節名稱作為查詢,通過谷歌新聞檢索額外的相關新聞文章。
2.2.2 戰略問題作為章節標題
態勢報告應具有邏輯結構和描述性的章節標題(圖3中的F2),以便情報分析師清晰且便捷地獲取信息(DS2)。SmartBook不僅描述每個章節的事件細節,還旨在呈現支持決策和政策規劃的戰略見解。為引導此類詳細分析,我們通過自動生成與每個主要事件相關的戰略問題形式的章節標題來納入邏輯結構。這些問題涵蓋有深度的細節,如事件中行動背后的動機及其潛在的未來后果。
近期工作(Sharma,2021年;Wang等人,2022a年)表明,與主要生成設計用于簡短具體答案的問題的現有方法(Murakhovs’ka等人,2022年;Du等人,2017年)相比,大語言模型(LLM)能夠生成全面的、自然的問題,這些問題需要長文本且信息豐富的答案。本工作中,我們指導大語言模型(GPT-4)生成關于特定事件的戰略問題,使用來自事件簇的新聞文章來錨定上下文并減少模型產生的幻覺(Ji等人,[n.d.];Maynez等人,2020年)。為確保生成問題的多樣性,我們使用核采樣(Holtzman等人,2019年)對多組問題進行采樣。我們的分析顯示,問題可能偶爾在不同集合間重復,如圖4所示(重復項以藍色高亮)。為解決此問題,使用在Quora重復問題對數據集上訓練的RoBERTa-large模型(Liu等人,2019年)執行問題去重,從而將集合合并為與事件相關的單一且多樣化的戰略問題集合。
2.2.3 主張與假設的提取
鑒于情報分析師工作的高風險性質及時間有限,他們需要能快速識別文檔中關鍵信息的系統(DS2)。這使他們能專注于緊急事務,而無需篩選無關數據。因此,自動態勢報告生成應能識別和提取跨多個文檔中最與場景相關且至關重要的信息(圖3中的F5)。態勢報告讀者受益于信息顯著性,因為他們能獲得簡潔、相關的態勢概覽。需要突出要點,以增強可讀性和清晰度。此外,我們還呈現每個新聞源的偏見(取自AllSides),以幫助分析師從不同角度考量所呈現的信息。
為向讀者提供對事件背景的全面理解,需要從源文檔(即新聞文章)中搜尋不同的主張和假設,以幫助解釋情境(Toniolo等人,2023年)。我們采用問答(QA)方式來識別與給定戰略問題相關的主張,這得益于定向查詢能夠系統地從新聞文章中提取相關主張的能力,如近期研究所示(Reddy等人,2022b年,a年)。我們的QA流水線使用一個基于轉換器的RoBERTa-large編碼器模型(Liu等人,2019年),該模型已在SQuAD 2.0(Rajpurkar等人,2018年)和自然問題(Kwiatkowski等人,2019年)上訓練。該模型將分割成片段的新聞語料庫連同戰略問題作為輸入,并輸出對這些問題的答案提取。包含這些答案的相應句子被視為提取的主張。然而,高置信度誤報的風險(Chakravarti和Sil,2021年)使得有必要對這些答案進行驗證(Reddy等人,2020年;Zhang等人,2021年)。為此,利用一個答案句子選擇模型(Garg等人,2020年)來根據戰略問題驗證每個上下文。該模型是一個以RoBERTa-large為骨干的二元分類器,在自然問題(Kwiatkowski等人,2019年)和WikiQA(Yang等人,2015年)等數據集上訓練,并輸出范圍從0(不正確)到1(正確)的驗證分數,用于選擇前5個最相關的上下文進行摘要生成。
2.2.4 基于事實的摘要作為章節內容
考慮到基于大語言模型(LLM)的摘要中的幻覺問題(Ji等人,2023年;Li等人,2023a年;Bang等人,2023年),對于態勢報告生成而言,事實性遠重于創造性。可靠的態勢報告必須基于可驗證的來源以確保可信度(DS3)。這支持分析師得出穩健、基于證據的結論,而嵌入式鏈接為希望深入研究的讀者提供了跳板(圖3中的F6、F7、F8)。此外,我們提供不同詳細程度的摘要——簡版(2-3句)、標準版(4-6句)和擴展版(2段)——以滿足不同讀者偏好(圖3中的F4)(DS4)。
使用為每個章節獲取的戰略問題作為章節標題,我們納入聚焦查詢的摘要生成來生成每個章節的內容。基于相關主張上下文(圖3中的F3)為SmartBook中的每個章節生成一個簡潔摘要。近期工作(Goyal等人,2022年;Bhaskar等人,2022年;Reddy等人,2022c年)表明,人類偏好基于提示的大語言模型(Brown等人,2020年;Chowdhery等人,2022年)生成的摘要,勝過在文章-摘要對上微調的模型(Lewis等人,2020年;Zhang等人,2020年;Liu等人,2022年),原因在于更好的可控性和更容易擴展到新場景。對于摘要生成,將前5個最相關的上下文(來自§2.2.3)和指令輸入大語言模型(GPT-4),指令要求其根據給定的戰略問題進行摘要并包含引用。這種方法不僅通過基于主張上下文有助于保持準確性,還通過允許對照引用來驗證而增強了摘要的可信度。
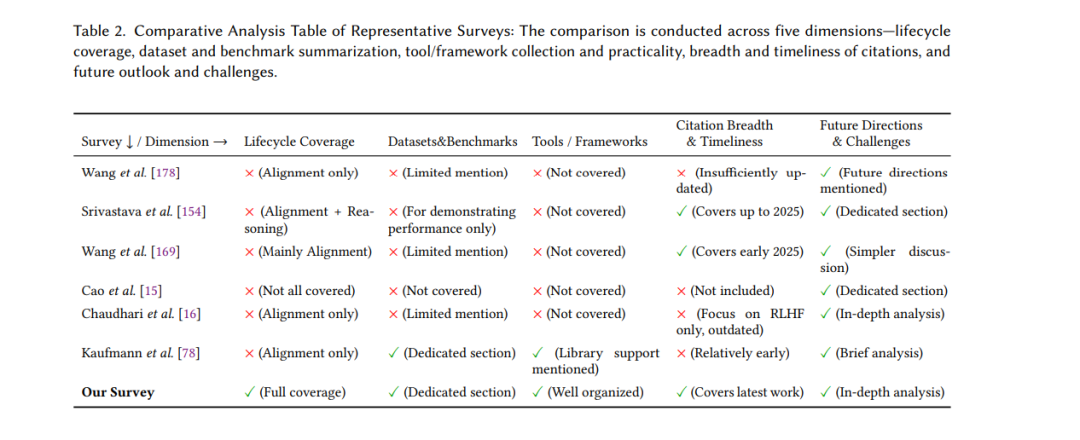
近年來,以強化學習(Reinforcement Learning, RL)為核心的訓練方法顯著提升了大語言模型(Large Language Models, LLMs)的推理與對齊性能,特別是在理解人類意圖、遵循用戶指令以及增強推理能力方面。盡管已有一些綜述工作對基于RL增強的LLM進行了梳理,但它們的研究范圍通常有限,未能系統總結RL在LLM全生命周期中的作用。本文系統回顧了RL賦能LLM的理論與實踐進展,尤其關注“可驗證獎勵的強化學習”(Reinforcement Learning with Verifiable Rewards, RLVR)。首先,我們簡要介紹RL的基本理論。其次,我們詳細探討RL在LLM生命周期各階段(包括預訓練、對齊微調以及強化推理)的應用策略。特別地,我們強調,RL方法在“強化推理”階段是推動模型推理能力逼近極限的關鍵動力。隨后,我們整理了當前用于RL微調的現有數據集與評測基準,涵蓋人工標注數據集、AI輔助的偏好數據以及程序驗證類語料。接著,我們回顧了主流的開源工具與訓練框架,為后續研究提供了清晰的實踐參考。最后,我們分析了RL增強LLM領域面臨的未來挑戰與發展趨勢。本文旨在向研究人員和實踐者呈現RL與LLM交叉領域的最新進展與前沿趨勢,以期推動更智能、更具泛化能力與更安全的LLM演進。
1 引言
諸如 ChatGPT [126] 等大語言模型(Large Language Models, LLMs)近年來迅速興起,并在通用對話 [9]、代碼生成 [105]、數學推理 [40] 等多種任務中展現出卓越性能,逐漸成為交互式人工智能系統的重要基石 [20, 21, 89, 98, 205, 206]。盡管 LLM 擁有廣泛的泛化能力,但當前模型仍存在關鍵缺陷:它們往往難以可靠地捕捉細微的人類意圖,并可能生成具有誤導性或不安全的輸出 [11, 14, 43, 81, 158, 185]。此外,若干最新研究 [65, 123, 151] 指出,LLM 的推理能力依然存在顯著不足。因此,如何有效地將 LLM 的生成能力與人類偏好、價值觀及具體任務需求對齊,并提升其解決復雜問題的推理能力,已成為當前 LLM 研究的重大挑戰之一。
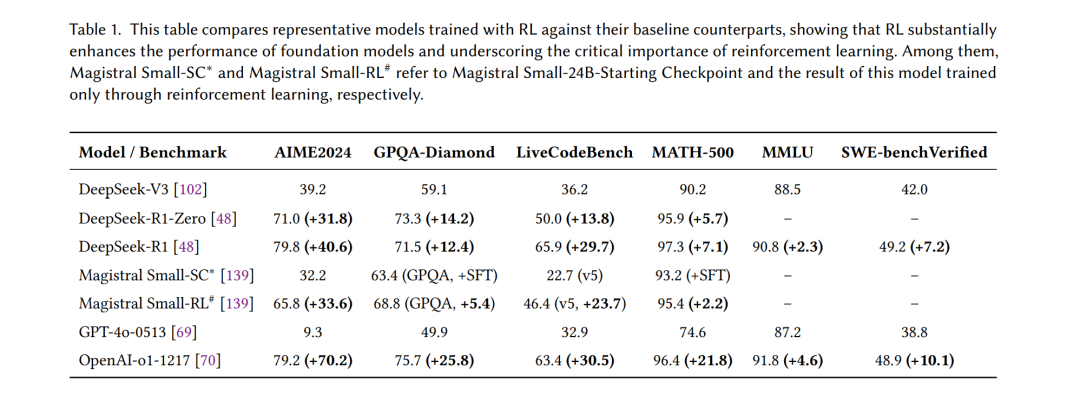
為應對這一挑戰,強化學習(Reinforcement Learning, RL)被引入作為一種強有力的框架,通過交互式反饋與獎勵信號直接優化模型行為。表1展示了典型模型在應用 RL 訓練后,相較基線模型的性能提升情況。自 Ouyang 等人 [129] 首次提出“人類反饋強化學習”(Reinforcement Learning from Human Feedback, RLHF)以來,基于 RL 的微調已經成為提升 LLM 與人類指令和偏好對齊的核心方法。通過利用人類評估反饋或學習到的獎勵模型,RLHF 使模型能夠迭代地調整輸出,使其更加符合人類偏好與需求,超越了單純監督訓練的效果。
在 RLHF 在對齊任務中取得成功的基礎上,研究者們近來也開始探索利用 RL 范式增強推理能力。值得注意的是,自 2024 年起,一系列先進 LLM 借助推理時(test-time)或后訓練(post-training)的 RL 技術,在復雜推理任務(如數學與編程)上表現出顯著提升。典型代表包括 OpenAI 的 o1 系統 [70]、Anthropic 的 Claude 3.7/4 [3]、DeepSeek R1 [48]、Kimi K1.5 [160] 以及 Qwen 3 [204] 等,它們均在推理階段融合了強化驅動的推理策略。這些成功案例表明,將 RL 應用于推理或后訓練階段,能夠解鎖超越預訓練知識的新型問題求解能力。
支撐這些最新進展的核心創新是“可驗證獎勵的強化學習”(Reinforcement Learning with Verifiable Rewards, RLVR)[48, 87, 204]。該范式在標準 RL 循環中引入了可客觀驗證的自動化獎勵信號,例如程序化檢查或對模型輸出的正確性證明。通過獎勵那些能夠通過嚴格正確性測試的輸出(如代碼的單元測試或數學定理驗證),RLVR 直接激勵模型生成可靠正確、邏輯嚴謹的解答。這一方法已成為推動推理能力提升的關鍵動力,使模型能夠持續推理多步問題,直到得到可驗證的正確結果。
然而,將 RL 整合進 LLM 的訓練與應用過程中,仍存在若干開放性問題與局限性。首先,學界仍在爭論 RLVR 是否真正拓展了 LLM 的推理能力,而不僅僅是放大了其預訓練中已學到的知識 [190, 218, 235]。其次,對于不同的 RL 技術在 LLM 生命周期各階段(從預訓練、指令對齊到推理優化)的最佳應用方式,目前尚無明確共識。第三,RL 在數據構建與優化策略上仍面臨實際挑戰,例如如何基于人工偏好標簽、AI 助手偏好或程序化獎勵構建高質量獎勵數據集,以及如何在策略梯度與獎勵模型優化等 RL 算法之間做出合理選擇,都是復雜的設計難題。最后,如何在大規模場景下高效且穩定地實施 RL 微調,而不破壞模型已有性能,依然是未解問題。
鑒于這些不足,本文旨在系統、全面地回顧 RL 增強 LLM 的最新進展,尤其聚焦自 2025 年以來快速發展的 RLVR 范式。我們希望澄清 RL 方法在整個 LLM 訓練流程中的作用,以及其在推動模型對齊與推理前沿中的貢獻。具體而言,本文將從以下幾個維度展開深入分析與討論:(1)RL 應用于 LLM 的理論基礎;(2)RL 在不同訓練階段(初始預訓練、對齊微調、推理時強化)的應用策略;(3)用于訓練與評估 RL 微調 LLM 的數據集與基準;(4)支持大規模 RL 訓練的最新工具與框架。通過這些維度的組織,我們期望為研究者和實踐者提供清晰的領域全景,深入剖析 RL 技術(尤其是 RLVR)的成效與局限,并為未來如何利用 RL 使 LLM 更加對齊、強大與可靠提供參考路徑。
1.1 相關綜述
近年來,大量綜述工作 [8, 12, 15, 16, 51, 72, 75, 78, 80, 85, 134, 154, 169, 178, 197, 224, 239, 240, 244] 對與大語言模型相關的強化學習研究進行了回顧,并提出了不同的分類方案。然而,這些綜述的研究范圍往往有限。例如,一些研究 [78, 178, 239] 僅聚焦于基于 RL 的對齊技術,其分類體系主要圍繞獎勵模型的使用展開,而忽略了若干重要的新興方法。盡管在 2025 年已有若干工作嘗試總結推理時 RL 的研究進展 [8, 12, 80, 197, 240],但這些回顧大多不夠全面,未能系統審視推理階段強化學習的多重維度。Pternea 等人 [134] 探討了 RL 與 LLM 的協同效應,但其分析主要局限于雙向 RL–LLM 協作的視角。Zhu 等人 [244] 則專注于“簡潔與自適應思維”這一狹窄領域。雖然這些綜述框架各有價值,但它們往往受限于特定視角,缺乏對 RL–LLM 交互進行統一的、端到端生命周期視角的系統分析。相比之下,本文系統性地考察了 RL 在整個 LLM 訓練流水線中的作用(涵蓋預訓練、對齊微調與推理),并提出了一個據我們所知尚未在既有研究中得到全面覆蓋的組織框架。表2總結了本文與其他代表性綜述相比的優劣勢。
1.2 貢獻總結
本文對 LLM 的 RL 技術進行了結構化綜述,主要貢獻體現在以下三方面: * 生命周期組織:我們系統覆蓋了 LLM 生命周期中的全流程 RL,詳細闡述了各階段(預訓練、對齊、推理強化)的目標、方法與面臨的挑戰。這一組織方式有助于厘清 RL 技術在 LLM 開發生命周期中的應用與優化路徑。 * 聚焦先進的 RLVR 技術:本文重點分析 RLVR 的最新方法。我們深入探討了 RLVR 的實驗現象與前沿應用,研究了如何確保獎勵的客觀與可驗證性,并討論了可驗證獎勵對模型性能與對齊的促進作用,同時展示了 RLVR 在真實應用中的優勢與局限。 * 資源整合:我們總結了 RL 研究中關鍵的數據集、評測基準與開源框架,為 LLM 中 RL 的實驗、評估與實踐提供參考。通過整合這些資源,我們為未來研究者提供了有價值的資料,提升 RL 驅動 LLM 研究的可復現性與透明度。
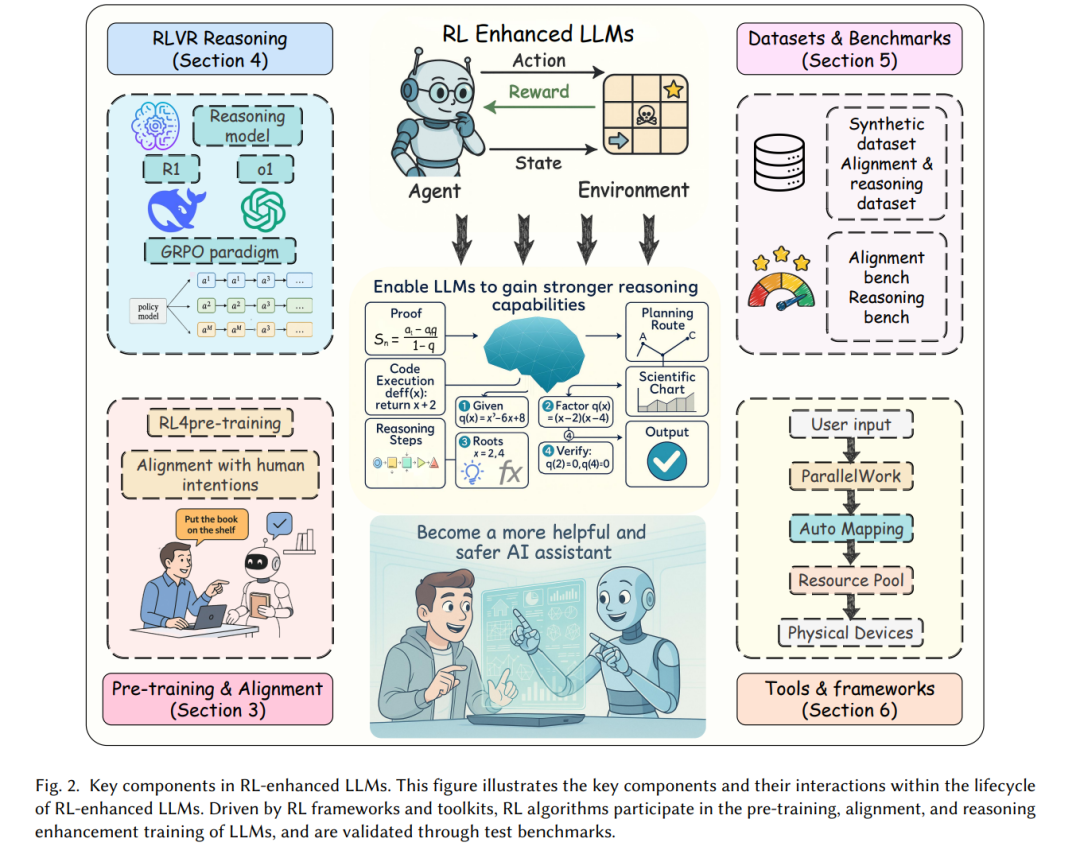
為提供組織化的路線圖,圖1給出了一個綜合性分類法,將現有方法劃分為五個分支:預訓練、對齊、RLVR、數據集與基準、開源框架。如圖2所示,本文圍繞 LLM 的完整 RL 生命周期進行綜述,特別強調可驗證獎勵的強化學習。總的來說,本文以生命周期為主線綜合現有方法,突出 RLVR,并結合研究與應用的實踐資源,形成一個系統性全景綜述。
本文提出一種將基于模型工程中的馬可夫“故障診斷”應用于揭示復雜概率性任務級仿真中因果關系的細微差別的方法。該方案旨在應對“馬賽克戰爭”(Mosaic Warfare)場景分析所引入的挑戰。馬賽克戰爭指將眾多作戰平臺集成為更龐大的力量包,以利用復雜性并將其轉化為非對稱優勢。隨著力量與技術的層級疊加形成復雜的系統之系統,馬賽克戰爭對任務級虛擬實驗的分析提出了挑戰。隨著復雜性增長,個體貢獻的重要性在宏觀尺度上愈發難以辨識。研究提出一種提煉該復雜性的方法,其通過數學方式將平臺網絡與相關數據向量相鏈接,超越了單平臺分析范疇。每個向量描述任務中的一種狀態或情境。借此,隨著狀態間連接與轉換揭示場景內殺傷網脆弱性出現的具體時刻,新的分析方法變得可行。在任務范疇內,脆弱性指負面事件,例如:資產損失、傳感器探測失敗、消息未接收、或任何導致場景轉向失敗的事件。在當今計算機上對任務級研究直接應用馬可夫分析雖不可行,但本文通過開發一種新穎可擴展的任務級數據提取、組織與聚類技術使其成為可能。本文概述了對簡單虛擬任務運用這些方法進行評估的初步結果。展望未來,該方法通過直接凸顯任務中的脆弱性,有助于將技術與戰略研發資源聚焦于所需之處。
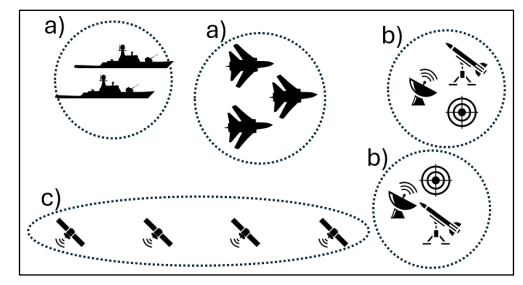
圖6. 平臺合并與分組策略。a) 位置與功能。b) 位置與通信。c) 通信與功能。
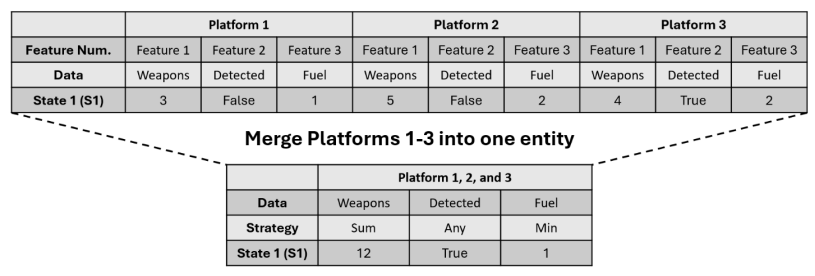
圖7. 三個平臺上的分組示例。可根據分析目標及對殺傷網的預期觀察指標,按特征指定合并策略。
“馬賽克戰爭”概念指將眾多獨立作戰平臺集成為更龐大的力量包,以利用復雜性并將其轉化為非對稱優勢(DARPA,2018年)。太空通過支持并增強地面力量設計,使其能以革新能力的新方式連接與協作,在該戰略中扮演關鍵角色。在任務級仿真尺度上,這些連接創造了復雜的交互網絡,難以解析為特定平臺、技術或時刻的可行動性能信息。當前方法通常利用任務結束時記錄的高度平均化的性能指標(Bernal,2020年)。這能捕捉總體性能趨勢,但無法解釋平臺交互網絡中的因果關系,而該關系有助于聚焦技術與戰略研發努力。例如,一項新技術可能在殺傷網某區域提升20%性能,卻在另一區域降低20%性能。最終性能指標幾乎無變化,但更精細地剖析結果能更好理解該技術對任務的影響,并為針對性能退化區域開展額外研發提供依據。
AFSIM作為虛擬試驗場
在兵棋推演仿真領域,AFSIM軟件作為虛擬試驗場,用于模擬大量交互協作智能體的任務(West & Birkmire,2019年)。這些智能體以其物理實體的“數字孿生”形式呈現,具有不同保真度(如機載預警與控制(AWACS)系統、防空導彈(SAM)陣地、無人機及衛星)。在軟件內,分析人員通過集結并控制這些智能體來模擬更宏大的目標場景(可包含對抗性交戰)。這些系統常被用于模擬從始至終的殺傷網及其中斷,以消除某些威脅。可添加太空層直接測試并比較其對任務性能的影響。然盡管該軟件能執行極度復雜的任務,美國國防部(DoD)、工業界與學術界正積極研究對這些任務進行更全面分析的方法。場景結果常被簡化為帶誤差線的柱狀圖,因為海量可用數據難以打包呈現以供分析人員理解或決策。盡管如此,AFSIM作為任務級研究和技術測試的常用測試平臺,因屬政府所有、開源且非專利,便于防務界共享成果與結論。
任務級仿真中的概率化結果
在AFSIM等任務級建模框架內,仿真尺度常要求模型降低復雜度以實時生成結果。在一項模型簡化示例中,許多物理復雜交互(如武器命中目標)通過概率判定(圖1)。該概率細節源自外部實驗或高保真仿真(West & Birkmire,2019年)。例如,對平臺X重復進行武器A的物理測試,以確定武器A針對平臺X在各種獨立設計變量下的殺傷概率。測試完成后,結果被匯入任務級仿真所用的殺傷概率表。或者,概率可能來自無實體或數字原型的概念技術的項目需求。此種情況下,概率將根據所考量技術的所需能力設定。這使得在詳細工程開發前,能測試理論技術對任務結果的影響。
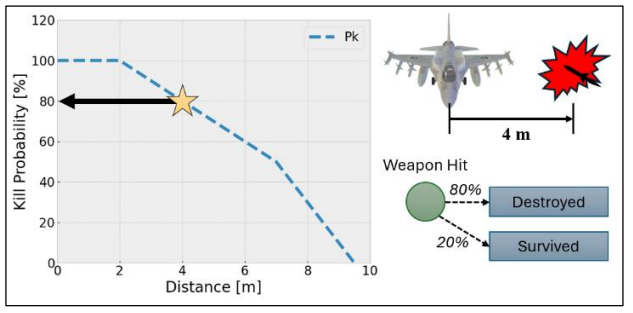
圖1. 通過概率建模的任務級物理交互樣本,基于結果生成分支化未來。
這種由任務級復雜性所需的概率驅動格式,為探索技術變革影響提供了新途徑。每次概率抽取均在仿真路徑中形成一個分叉。更優的技術或戰略可能在更關鍵時刻影響該分叉轉向更佳路徑。在分析中利用此特性,將對技術影響產生更細致的洞察,尤其在任務復雜性增加、個體貢獻重要性在宏觀尺度難以辨識時。仿真路徑的偏差亦可能源于任務參與者做出不同決策或行動,而非僅限物理近似概率抽取。AFSIM軟件具備表征此類結果多樣性的數學基礎,但常被視為需克服的障礙甚或被忽略。通過利用基于模型的工程(MBE)、機器學習與統計學概念,有機會更好利用AFSIM的分支特性以開展更具洞察力的分析。該分析源于能闡明特定行動在何時、何地、如何、為何及以何種概率導致特定結果的技術。
基于任務級馬爾可夫鏈的殺傷網比較
通過對任務進行充分采樣,所有合理可能的狀態序列均被識別。將狀態轉移矩陣打包為馬爾可夫鏈,可將信息呈現為描述任何給定時刻所有可能未來的狀態連接網絡。若對兩種技術或策略進行仿真,則會生成兩個不同的馬爾可夫鏈并可進行比較。只要狀態定義保持統一,這便提供了詳細探索新技術影響之處的機會。請參見圖3中對兩個殺傷網系統的比較。為簡化起見,馬爾可夫鏈的起始狀態及成功與失敗的終止狀態均被清晰標識。在此比較中,改進后的系統改變了狀態2的結果概率,這直接影響了任務軌跡并確保了更高的成功幾率。在此簡化示例中,狀態2代表一個關鍵脆弱點,若出現錯誤結果將導致殺傷網失效。此項比較系2027年二期階段計劃的目標產出。在此,Infinity實驗室提出了若干與用狀態向量表示任務級仿真相關的挑戰,并提出了在實現馬爾可夫有向圖最終比較的進程中克服這些挑戰的方法。
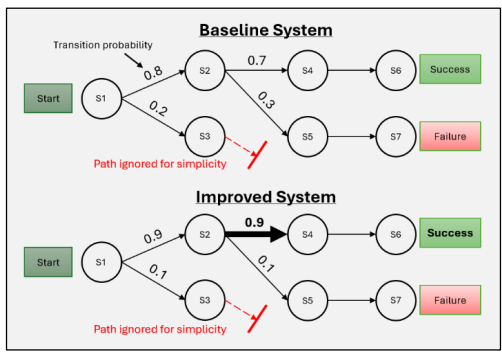
圖3. 通過馬爾可夫鏈比較兩種技術。此二期階段目標產出凸顯了技術提升成功幾率的具體時刻。
現代戰爭日益由信息環境塑造,其中決策的速度、準確性與可靠性對取得作戰成功至關重要。隨著對手利用先進能力在信息環境中操縱、干擾與主導,海軍陸戰隊必須采用變革性技術以保持競爭優勢。本文探討人工智能與機器學習(AI/ML)增強所有作戰職能決策能力的潛力,并特別聚焦信息領域。人工智能與機器學習系統可提升態勢感知能力、加速數據處理速度,并為動態作戰環境中的指揮官提供可行動洞察。然而,將人工智能與機器學習能力整合至海軍陸戰隊作戰并非毫無風險。作戰脆弱性、技術局限性與倫理風險均構成必須應對的重大挑戰,以確保有效且負責任的實施。本研究結合條令審查、技術評估與作戰想定,對人工智能與機器學習賦能決策的優勢、劣勢、機遇與威脅(SWOT)進行全面分析。針對作戰職能的實用建議可指導海軍陸戰隊整合人工智能與機器學習能力,從而強化決策能力并在未來競爭連續體沖突中確保信息優勢。
信息環境是現代作戰的主導因素。基于技術進步與信息在無數平臺上的擴散,獲取并保持信息優勢的需求從未如此重要。信息戰非動能卻高度破壞性的特質,是敵對國投入大量資源擴展其信息能力的驅動因素。自美軍2017年將信息確立為第七項聯合作戰職能以來,美海軍陸戰隊在加強信息能力方面取得進步。從發布兩份關鍵信息文件——《海軍陸戰隊條令出版物(MCDP)8:信息》(2022年)與《海軍陸戰隊作戰出版物(MCWP)8-10:海軍陸戰隊作戰中的信息》(2024年),到2023年成立海軍陸戰隊信息司令部(MCIC),海軍陸戰隊已布局以贏得信息優勢斗爭來支持聯合部隊。這些工作凸顯了信息作為既定作戰職能的重要性與戰略意義。
在指揮控制、機動、火力、情報、信息、后勤與部隊防護等作戰職能中,信息作為各項職能的賦能要素,被廣泛視為其“共同分母”(美國海軍陸戰隊[USMC],2024年,第11頁)。信息是決策的養分,而決策是作戰職能的關鍵方面,必須持續增強以獲取相對于對手的作戰優勢。以人工智能與機器學習形式呈現的快速演進技術,可促進作戰人員決策過程的速度與效能提升。隨著這些新興技術持續為部隊提供關鍵能力,在海軍陸戰隊內部運用時必須考量若干關鍵因素。
A. 問題與目的陳述
現代戰爭日益復雜的特性已將作戰空間擴展至信息領域,其中決策的速度、準確性與可靠性可決定任務成敗。隨著對手采用復雜戰術操縱、干擾并主導該領域,作戰人員對先進工具處理與解讀海量數據的需求日益增長。新興人工智能與機器學習能力在應對此挑戰方面具有變革性潛力。海軍陸戰隊持續在現行作戰中利用人工智能與機器學習能力以提升效能并演變為更具殺傷力的戰斗力量。通過運用自動化數據分析、模式識別與以空前速度生成可行動洞察等能力,人工智能與機器學習技術使作戰人員能夠實時做出知情決策,從而增強作戰效能與戰略優勢。
然而,人工智能與機器學習的運用伴隨必須由海軍陸戰隊考量的重大弱點與脆弱性。本研究審視將人工智能與機器學習系統整合至海軍陸戰隊決策過程的益處與挑戰,并探索如何在該信息領域利用這些技術以在現代戰爭中獲取戰略優勢。
本文旨在分析將人工智能與機器學習整合至所有作戰職能決策過程(尤其在信息環境作戰(OIE)中)的優勢與潛在局限。通過本研究,目標是開發增強人工智能與機器學習支持并降低海軍陸戰隊作戰決策過程脆弱性的方法。人工智能與機器學習的現存缺陷源于其無法檢測錯誤或漏洞,即使這些錯誤極其嚴重。通過探索人機協同等協作作戰方法以及人工智能與機器學習的兩個關鍵階段(訓練與使用)來應對這些挑戰。最終,本研究致力于提升組織效能與改進決策過程。
B. 方法論
本文提供定性化全面研究,審視當前海軍陸戰隊、海軍與聯合條令、政策、出版物、范例及關于信息環境作戰、人工智能與機器學習、作戰與決策過程的開源信息。此外,檢視關于倫理決策的范例與出版物以提供信息環境作戰與人工智能與機器學習之間的關聯性。作戰想定旨在為人工智能與機器學習在海軍陸戰隊作戰中的運用提供背景。海軍陸戰隊濱海團(MLR)作為研究人工智能與機器學習范例的主要作戰單位。最后,運用優勢、劣勢、機遇與威脅(SWOT)分析結合信息職能(生成、保存、拒止與投射(GPDP))執行效能評估,對濱海團在想定中的人工智能與機器學習應用進行評價。
C. 主題范圍
本研究范圍聚焦于海軍陸戰隊信息力量如何利用人工智能與機器學習支持所有作戰職能中的決策。人工智能與機器學習等新興技術為部隊機對手提供利用機遇。這正是為何在整合新技術時必須遵循相關速度至關重要。同時,保持競爭優勢需要全面理解這些系統為作戰(特別是海軍陸戰隊)帶來的能力與問題。本文僅聚焦作戰決策,不考察非作戰行政活動中可能存在的其他效能提升。
D. 論文結構
本研究分為六個部分:引言、文獻綜述、海軍陸戰隊作戰職能、人工智能與機器學習能力與風險、濱海團想定,以及最終結論與建議。第二章文獻綜述為信息環境作戰與決策過程的背景與作戰概念提供語境。第三章作戰職能探索海軍陸戰隊七大作戰職能如何通過信息視角實現整合與增強,強調人工智能與機器學習在獲取信息優勢與支持全戰場決策中的關鍵作用。第四章人工智能與機器學習能力與風險檢視人工智能與機器學習在海軍陸戰隊作戰中的能力與風險,突出其增強決策潛力的同時引入必須審慎管理的倫理考量、作戰影響與技術挑戰。第五章濱海團想定通過作戰想定分析濱海團如何在爭議海域環境中運用人工智能與機器學習系統,使用SWOT與GPDP框架評估技術整合對現代戰爭的優勢、風險與影響。第六章呈現研究結論與建議,強調人工智能與機器學習系統如何增強決策并支持作戰職能,同時倡導改進培訓、倫理監督與跨部門協作以確保有效且負責任地整合至海軍陸戰隊作戰。
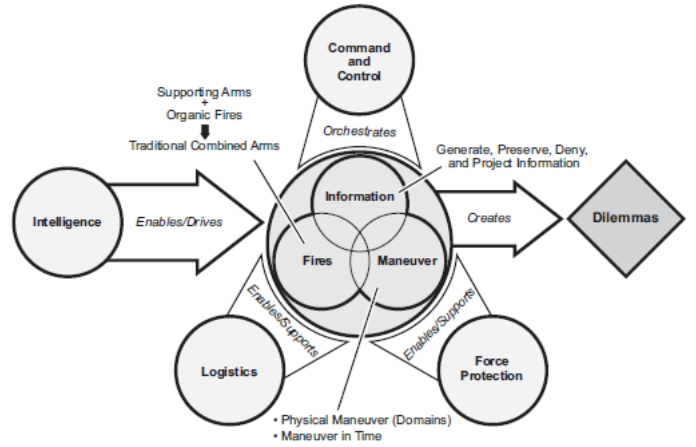
圖2。聯合兵種功能方法中的信息因素。
空中威脅的快速演進與擴散——包括無人駕駛航空系統(UAS)、高超音速武器及其他新興平臺——對現代戰爭構成重大挑戰。對手部署這些系統進行偵察、目標定位與直接打擊,常以摧毀防空反導(AMD)傳感器以奪取制空權為目標。盡管整體威脅數據豐富,但具體型號的細節信息仍有限且快速過時。依賴全面數據集與有限領域專家(SME)資源的傳統建模與仿真(M&S)技術難以跟上這些動態威脅的步伐。因此,美國必須開發敏捷解決方案,在不完整數據條件下分析大量演進中的威脅。本文探索將先進M&S的自動數據生成與稀疏真實樣本相結合的方法,以訓練人工智能(AI)評估復雜威脅空間中的選項。本文研究AI技術如何推斷缺失特征并構建反映流動戰術的自適應作戰模型。本文方法的核心是“分配、韌性及生存性傳感器試驗臺”(STARS),該開放架構平臺專為仿真與評估新策略而創建。通過使AI能夠在零散觀測間“串聯線索”并與STARS交互,本文方法可增強實時決策能力,使指揮官能優化傳感器部署、優先保障關鍵區域并有效部署對抗措施。此外,該方法面向“美國金穹計劃”(GDA)等倡議,這些倡議旨在通過AI驅動集成加強分層防御,為適應快速演變的空中威脅提供可擴展解決方案,同時保留必要的人工監督。

現代戰爭日益由無人駕駛航空系統(UAS)、高超音速武器等空中威脅主導,這些平臺通過其速度、復雜性與適應性挑戰傳統防御策略。對手利用這些系統進行偵察、瞄準關鍵資產,并通過摧毀或致盲傳感器削弱防空反導(AMD)能力。雖然威脅數據總量持續增長,但在理解特定威脅型號、其演進特性及可能由AI控制器實時決策驅動的動態作戰戰術方面仍存在關鍵空白(邦達爾,2025年)。現有情報的快速過時加劇了這些空白,使傳統建模與仿真(M&S)方法顯得不足。M&S平臺能探索假設性防御場景與傳感器交互,但通常依賴大量輸入模型庫與專家時間。盡管傳感器網絡如今每日產生太字節數據——從高分辨率雷達回波到紅外圖像及電子戰截獲信息——但新威脅型號的關鍵細節仍然隱藏。數據量造成了飽和問題:重要信號湮沒于噪聲中,領域專家(SME)團隊無法手動篩選每個字節,對手的創新由此漏檢。因此,情報中心難以在數據分析工作量與快速更新威脅模型的需求間取得平衡。矛盾的是,在這座數據大山中,分析師也因對每個獨立威脅的認知匱乏而受阻。由于UAS配置眾多且瞬變,無法為每個型號建立精確定義模型。當攻擊者能在數周內部署改裝UAS或新型高超音速方案時,標準M&S流程產生的模型在定稿前即已過時。
本文研究先進M&S與AI的集成如何增強不完整或稀疏數據環境下的威脅分析與決策。方法將AI直接嵌入高保真M&S框架,以實現數據分類與推斷的自動化。提出的“分配、韌性及生存性傳感器試驗臺”(STARS)作為本研究的代表性仿真環境。通過利用AI驅動數據壓縮,將過載的傳感器輸出數據提煉為簡明特征集,在保留潛在威脅指標的同時突出異常。在后續章節中,詳述四大核心AI應用——數據壓縮、合成空白填充、資源優化及對抗場景生成——并演示AI增強的M&S如何將數據飽和轉化為戰略優勢。該工作面向“美國金穹計劃”(GDA)及“關島防御任務”等,這些構想旨在建立能利用AI實現比對手創新更快適應的分層全域防御網絡(美國國防部,2025年)。本文提出的方法為防御系統適應快速演變威脅提供了一條可擴展路徑,確保能有效響應而不過度依賴過時或不完整數據。通過結合自動化模擬和機器學習的優勢,本文有助于開發靈活、數據高效的解決方案,使戰術指揮官能夠在有爭議的空域保持態勢感知和作戰彈性。
現代大規模作戰行動(LSCO)的實施方式特點在于,日益頻繁和多樣化地使用集成到指揮、控制、計算機、通信、情報、監視與偵察(C4IRS)系統中的無人駕駛航空器(UAV)。這些航空器是現代大規模作戰行動中最重要的武器類型之一。任何掌握該技術的一方,若能處理來自戰場的最新信息并將其安全傳遞至指揮中心,便擁有巨大優勢,并有機會對旨在阻止其進一步作戰行動的部隊造成重大殺傷。關鍵在于,無人機必須通過偵察與撤退路線的選址行動具備一定程度的自我防護能力。本文闡述了在LSCO中使用無人機執行各種任務的可能性,并提供了其在以往現代武裝沖突中應用的案例研究。
科學技術的強勁發展,特別是第四次工業革命的顯著成就,為社會生活各領域帶來了諸多變革。這一點在防務與安全領域尤為突出,該領域的作戰活動效能顯著提升,科技成果的應用極大地提高了部隊的作戰效率。現代作戰行動需要使用最復雜的作戰資產,以高效執行受領的任務。無人駕駛航空器的使用是現代作戰行動不可或缺的環節。由于其用途廣泛且具有不同的結構與作戰特性,它為配備此類作戰裝備的部隊提供了廣泛的可能性。通過使用集成到C5ISR系統中的無人駕駛航空器,可在網絡防護下實時掌握戰場態勢,這為決策者在作戰行動中及時有效地指揮部隊提供了可能。C5ISR是指揮、控制、計算機、通信、網絡、情報、監視與偵察的縮寫,是未包含網絡要素的C4ISR系統的升級版(圖1)。現代作戰行動中使用了各類無人機,從商用無人機到向指揮中心傳輸數據的武裝作戰無人機。無人駕駛航空器在現代作戰行動中的使用日益增多,尤其用于對地面目標的偵察、監視與瞄準。為使無人駕駛航空器在戰斗中有效并滿足現代戰爭的要求,必須具備某些特定特性。

圖1:C5ISR系統
大規模作戰行動中的C5ISR系統
現代軍隊已日益依賴信息技術來支持任務規劃與執行。隨著對多域作戰(MDO)研究的深入調查,常規任務行動預計將涉及網絡與物理資產之間的眾多交互。在未來作戰空間,這些網絡-物理交互預計將由作戰環境的特點以及用于完成C5ISR(指揮、控制、計算機、通信、網絡、情報、監視與偵察)任務的工具和技術所引入。
美國陸軍C5ISR中心網絡安全服務提供商(CSSP)是一個全天候運行的防御性網絡行動(DCO)組織,負責保護美國國防部和美國陸軍網絡免受敵對網絡活動侵害,并為國防部內的DCO操作員開發技術與能力。近年來,C5ISR中心CSSP一直在研究各種先進的數據可視化概念與策略,以提升網絡安全分析師工作流程的速度與效率。為實現這些目標,已采用虛擬與混合現實(VR/MR)工具進行研究,探究這些媒介是否能實現DCO操作員有效的遠程協作,以及立體可感知的3D數據可視化是否能使DCO操作員對其數據集獲得更深入的后見之明。利用聯合勤務C5I-ISR與C2(指揮與控制)集成,實現全域作戰的新聯合作戰概念。
要成功在傳統戰爭域中取勝,必須理解信息環境,該環境包括頻譜、太空、網絡域以及在其間流動的數據。信息時代的戰爭特征在于基于精確數據做出決策并由此取得成功。快速分析環境與對手以加速決策的能力是成功的關鍵。有效溝通的能力對任何現代軍事行動的成功都至關重要。這適用于各軍種、任務和訓練計劃。作戰力量現在與有效的跨防務頻譜的情報收集與分發協同使用,以決定任何沖突的結果。C5ISR技術有助于識別并響應事件。由人工智能與云技術驅動的現代C5ISR系統,有助于為前線人員提供關鍵數據。
武裝部隊希望在復雜、對抗性強、人口密集的城市環境以及無固定平民人口和基礎設施的開放環境沖突中,獲得相對于對手的決策優勢。因此,C5ISR系統擁有提供必要信息的工具,以在復雜作戰場景(包括空中、陸地、海上和網絡空間)中實現指揮與控制行動。
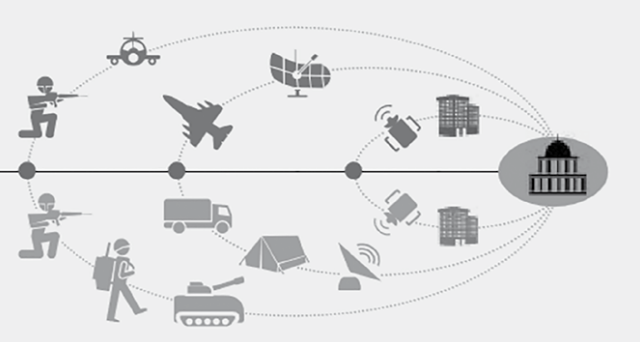
圖4:包括海、空、陸、網絡在內的不同環境中的C5ISR
C5ISR系統集成在作戰層級接收的信息,生成作戰態勢,管理計劃、命令、報告并在各級指揮機構間分發信息。戰斗態勢感知是所有現代大規模作戰行動的基石。C5ISR系統無縫集成來自多源多傳感器的大量信息,并基于這些信息生成戰場態勢的總體概覽,從而實現及時正確的決策。

圖5:各種戰斗場景中的C5ISR界面示例
C5ISR在戰場上提供多種能力,可對正在進行的行動的結果產生積極影響。
C5ISR系統除其多種能力外,還具有一系列在戰場上有用的功能。通過其工具,C5ISR在整個行動期間持續收集并分類數據以支持決策。它還包含用于戰略決策過程的工具,以生成“戰斗序列”(作戰序列/命令)并產生定義要采取的行動、所有行動的時間及其活動地理區域的命令。除這些功能外,它還具有模擬和預測敵方部隊可能反應的功能,并提供如何應對的建議。

圖6:C5ISR無人機向地面單位提供實時反饋
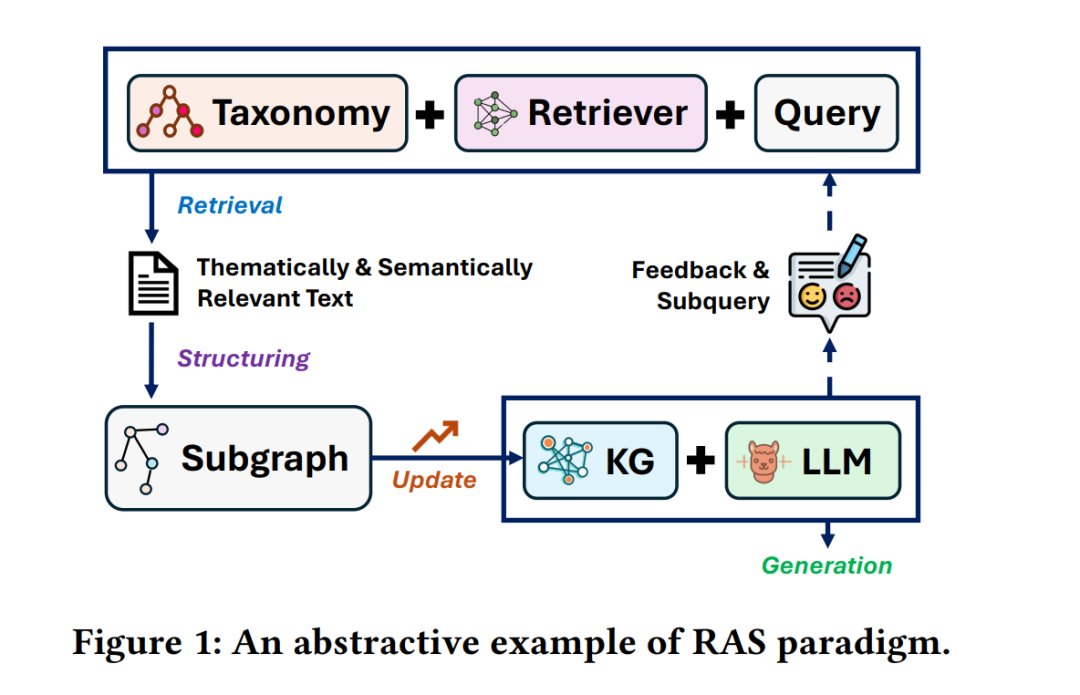
大型語言模型(Large Language Models, LLMs)憑借其在文本生成與推理方面的卓越能力,已經徹底改變了自然語言處理領域。然而,這些模型在實際應用中仍面臨關鍵挑戰,包括幻覺生成、知識過時以及領域專長有限等問題。檢索與結構化增強生成(Retrieval And Structuring, RAS Augmented Generation)通過將動態信息檢索與結構化知識表示相結合,有效緩解了這些局限性。 本綜述工作:(1) 系統考察了外部知識訪問的檢索機制,包括稀疏、稠密以及混合檢索方法;(2) 探討了文本結構化技術,如分類體系構建、層次化分類和信息抽取,這些方法能夠將非結構化文本轉化為有組織的表示形式;(3) 分析了這些結構化表示如何通過基于提示的方法、推理框架和知識嵌入技術與LLMs集成。此外,本文還指出了在檢索效率、結構質量和知識集成方面的技術挑戰,并強調了多模態檢索、跨語言結構以及交互式系統等研究機遇。
這一全面的綜述為研究人員和實踐者提供了有關 RAS 方法、應用及未來發展方向的重要見解。
1 引言
大型語言模型(Large Language Models, LLMs)已經徹底改變了自然語言處理領域,在從文本生成到復雜推理等任務中展現出前所未有的能力 [2, 17]。這些模型基于海量文本數據進行訓練,在理解上下文、生成類人化的響應,以及通過最少指令適應多樣化任務方面表現出顯著優勢 [190, 258]。然而,在真實應用場景中部署時,LLMs 仍面臨若干關鍵挑戰:它們可能生成看似合理但事實錯誤的信息(即幻覺)[82, 86],依賴可能已經過時的訓練數據 [124, 171],并且在專業領域中缺乏足夠的知識專長 [195, 227]。
在知識密集型應用中,這些局限性尤為明顯,因為此類應用對準確性和可靠性要求極高。雖然 LLMs 擅長模式識別和文本生成,但它們在保持事實一致性和獲取最新信息方面存在困難。在科學研究、醫療健康或技術等專業領域,LLMs 常常缺乏實現可靠性能所需的精確和細致的知識 [50, 95, 145]。
為應對這些挑戰,研究者提出了 檢索增強生成(Retrieval-Augmented Generation, RAG)框架,它通過在生成響應前從外部知識源檢索相關信息來增強 LLM 的能力 [64, 124]。通過將生成與檢索文檔相結合,RAG 有助于減少幻覺并使模型能夠訪問其參數中未包含的最新信息。然而,傳統的 RAG 方法仍存在根本性局限:它們通常僅處理非結構化的文本片段,而未能利用結構化知識;其檢索結果中常包含非原子化信息,可能誤導 LLMs [50, 95, 261];并且在應對需要多跳推理或特定領域知識組織的復雜查詢時表現不足 [303, 306]。
檢索與結構化增強生成(Retrieval And Structuring, RAS)作為一種更強大的范式應運而生,它通過將動態信息檢索與結構化知識表示相結合,有效克服了上述局限。RAG 為 LLMs 與外部信息建立連接奠定了基礎,而 RAS 在此之上進一步擴展其能力:引入知識結構化技術,將非結構化文本轉化為有組織的表示形式,如分類體系、層次結構和知識圖譜 [46, 224, 299]。這些結構化表示不僅有助于組織檢索到的信息,還能引導檢索過程,并為驗證 LLM 輸出提供框架。
最新的 RAS 研究成果已經展示了顯著的性能提升:包括與 LLM 推理模式更契合的新型檢索策略 [63, 252],以及構建高質量知識表示的方法改進 [90, 116]。檢索與結構化機制的深度融合,為多個領域帶來了新的可能性:在科學研究中,RAS 系統能夠在保持技術準確性的同時綜合信息 [37, 275];在電子商務中,它們可生成個性化推薦 [26, 279];在醫療健康中,則能提供可靠的上下文信息 [110, 259]。 盡管如此,要充分發揮 RAS 的潛力,仍需解決若干挑戰:包括大規模高效檢索 [238, 314]、保持高質量的知識表示 [306]、將結構化信息無縫集成到 LLM 推理過程 [151, 230],以及在計算開銷與實時性能之間實現平衡 [48, 128]。
本文對 RAS 的組成部分、應用和未來方向進行了全面的綜述。我們首先介紹 LLMs 與檢索增強生成的基礎知識,隨后系統討論先進的檢索機制與文本結構化方法(如分類體系構建、層次化分類與信息抽取)。接著,我們分析這些結構化表示如何與 LLMs 集成以提升推理與適應能力,進一步考察其在不同領域的應用,最后總結尚存的技術挑戰與未來研究機遇。
人工智能的快速發展正在重新定義人機交互模式,推動系統從人類操控工具向人機協作伙伴關系轉變——人類與人工智能作為近端協作伙伴共同達成卓越成果。傳統人機協作將機器視為從屬輔助工具,但人工智能日益增強的自主性要求建立新的協同效能范式,尤其在復雜作戰環境中。本文主張將人機協作概念集成至支持"實況、虛擬與建構"范式的建模與仿真框架,該范式是國防部訓練、評估與任務演練的基石。隨著國防部門與工業界優先推進人工智能應用,現行建模仿真方法與實況虛擬建構體系缺乏表征人機協作動態的保真度,存在無法應對現實應用的風險。集成這些概念對提升訓練質量、優化系統設計以及確保仿真互操作性標準演進以滿足新興需求至關重要。本文提出利用實況虛擬建構環境通過混合仿真探索人機協作——結合實況人機交互、虛擬場景與建構模型——同時評估高層體系架構與分布式交互仿真等標準的適應性。將人機協作集成至實況虛擬建構的建模仿真體系有望填補關鍵空白,為增強基于人工智能的作戰行動提供更有效準備,并為推進仿真能力提供路線圖。
人工智能日益廣泛的應用正推動從傳統人機協作向人機協作伙伴關系的轉變,人類與人工智能系統作為近端伙伴協同實現共同目標。然而,必須明確區分人機團隊、人機協作團隊及其運作的人工智能增強環境。人工智能的加速應用顯著改變著人機交互的本質。盡管歷史上人機協作主要體現為人類將機器作為工具使用,但人工智能的最新進展推動了向人機協作的演進。在此范式中,人類與人工智能系統作為近端伙伴協同作戰,發揮各自優勢并合作達成共同目標。必須認識到人機協作代表特定形式的人機協作,其特點在于人工智能系統在團隊中展現出的高度自主性與責任共擔。
人類與機器可能在人工智能深度塑造的環境中運作,例如含人工智能實體的仿真系統、人工智能驅動的決策支持系統或集成人工智能的真實環境(如自主載具、智慧城市)。本文聚焦于人類與人工智能相互依賴履行角色并完成集體任務的交叉領域。盡管人類可能與各類精密程度不同的機器協作,我們關注的是能理解語境、制定決策并從經驗中學習的人工智能系統,因此將其與缺乏這些認知功能的基礎自動化系統或機器區分。圖一闡釋了各類人機交互關系,重點呈現人工智能的作用。該示意圖描繪定義人機協作譜系的三個關鍵維度:
- 自主性層級:表征機器執行任務的獨立程度;
- 機器采用認知方法:標示機器在運作中是否運用學習、決策與問題解決等認知過程;
- 人機交互類型:涵蓋:? 人機集成:人類將機器作為工具使用的基礎交互;? 人機智能集成:涉及人工智能技術的交互,人工智能主要輔助人類任務;? 人機團隊協作:人類與機器作為協調團隊共同工作的協作式交互,但機器角色仍以支持為主;? 人機協作伙伴關系:最高層級的協作,以人類與人工智能系統間的近端伙伴關系為特征,包含決策權與責任共擔。
復雜性在于這些界限并非總是清晰,且不同類型的人機交互可能存在重疊。例如,每類交互的具體特征將因使用場景、所涉人工智能技術及預期人類參與程度而異。我們主要關注人機協作伙伴關系型協作,尤其在其所謂人工智能增強型實況、虛擬與建構環境中的影響。需理解雖然交互是協作的必要組成部分,但并非所有交互都構成協作。在協作過程中,人類與人工智能系統作為真實伙伴運作,共享目標、責任與決策權(奧尼爾、弗拉特曼、麥克尼斯與薩拉斯,2023年)。作為真實協作者的人工智能系統具有能動性及學習適應能力。因此,諸如實況虛擬建構訓練等活動若期望實現人機協作,必須強調相互依賴性、互信與共識理解。在此背景下,人機協作是人類與人工智能系統間深度協作的關系,雙方共同致力實現統一目標。為區分人機協作伙伴關系與其他形式的人機協作,需考量:
? 人工智能自主性層級:相較人類自主性交互,人機協作伙伴關系涉及更高水平的人工智能自主性與責任共擔;
? 協作焦點:人機協作伙伴關系強調真實協作與伙伴關系,而人類自主性交互及人類監督的機器間協作更側重人類控制與系統可靠性;
? 決策權威:在人機協作伙伴關系中,決策權威常由人類與人工智能共享,其他模式中人類保留主導控制權;
? 復雜性:訓練與作戰環境中的人機協作伙伴關系呈現獨特挑戰,源于人工智能實體精密程度提升、人類與人工智能決策要素間交互作用,以及對穩健信任與協作的需求。
在人工智能增強環境中實現有效人機協作,需要深度理解人類認知、行為與社會動態,以及人工智能系統的能力局限及其對環境的影響(美國國家科學、工程與醫學院,2021年)。既往團隊效能研究表明:"人工智能系統要成為團隊組成部分,必須具備運作中的相互依賴性及執行中的自主性"(美國國家科學、工程與醫學院,2021年)(雷耶斯、丁與薩拉斯,2019年)(薩拉斯、庫克與羅森,2008年)。達成此層級協作與自主性,需要精細把握人類與人工智能系統如何在動態且日益復雜的環境中有效協同。
當前,對手采取多域作戰手段構成的威脅日益加劇。多域作戰理念是為理解多域威脅并減輕其影響而提出的應對方案。然而,現有建模與仿真技術的發展滯后于多域作戰理念的演進。防務組織應如何應對多域作戰挑戰?本文提出一種計算機輔助多域作戰兵棋推演概念。該概念展示如何運用建模與仿真技術,在兵棋推演中模擬真實世界的多域作戰復雜性,同時借助計算能力輔助決策者理解這種復雜性。在軍事組織持續推進多域作戰理念落地過程中,聚焦于開發建模與仿真支持技術。建模與仿真技術在軍事行動中的應用已有多年歷史。多域作戰帶來新型復雜性,對建模與仿真提出新挑戰。通過采用概念開發與實驗方法推進建模與仿真在多域作戰中的應用,在建模與仿真和人工智能技術運用方面獲得新認知。我們引入簡化版指揮控制兵棋推演循環,并通過功能增強使其支持多域作戰決策。兵棋推演中的虛擬世界呈現真實世界復雜性,以激發面向多域作戰的決策行為,并研究如何借助建模與仿真工具及生成式人工智能為決策者提供支持。本概念支持快速原型開發,以探索復雜多域作戰環境中決策者的需求與機遇。這將助力防務組織推進多域作戰理念實施,增強應對多域威脅的韌性。
多域作戰理念涵蓋陸、空、海、太空及網絡領域的集成化規劃與執行,以及與非軍事活動的協同配合(參見埃文森等人2024年;弗拉克等人2020年;北約盟軍轉型司令部2022年;斯科特2022年文獻)。其目標是達成戰略目的之聚合效應,提升軍事行動效能。通過同步軍事與非軍事活動,多域作戰旨在實現協同效應,使整體影響大于部分之和。然而作為理論概念,多域作戰并未規定具體實施方式,更未明確人員培訓方法。傳統軍事經驗訓練工具是兵棋推演(參見發展、概念與條令中心2017年文獻)。兵棋推演聚焦軍事思維與決策訓練。多域作戰理念的引入為兵棋推演帶來新復雜性。跨域效應集成同步及與非軍事活動協調的需求,要求兵棋推演考量更廣泛變量與交互關系。這種復雜性提升對開發精確可靠模型及解讀推演結果構成挑戰。因此,兵棋推演方法須演進以適應多域作戰特性,融合先進技術與分析手段以支持更全面現實的模擬。但多域作戰理念未規定這些技術方法的具體應用方式,故需通過實踐驗證。雖兵棋推演未必需要計算機輔助,但生成式人工智能的最新進展為開發豐富環境場景、實施“裁判”(兵棋術語稱“裁決”)及跟蹤推演態勢提供新機遇。本文提出一種計算機輔助回合制多域作戰兵棋推演概念。鑒于文獻缺乏關于優秀多域作戰兵棋的界定標準,本概念采用快速原型開發方法以實踐方式探索多元解決方案。通過向軍事利益相關方展示功能原型而非空白方案,可將需求討論從“從何起步”引導至“邁向何方”。
結構如下:首先簡要探討兵棋推演與多域作戰,引入共同態勢理解概念——我們視其為多域作戰背景下計算機輔助兵棋推演的重要機遇(參見“背景”章節);繼而提出計算機輔助兵棋推演概念(參見“計算機輔助多域作戰兵棋推演概念”章節)。該概念以通用指揮控制兵棋為核心,應用建模與仿真及人工智能技術從兩方面增強推演效能:(1)豐富驅動兵棋的模擬環境,引入構建沉浸式多域作戰場景所需的復雜性;(2)添加共同態勢理解組件,輔助決策者理解(模擬)戰場態勢。隨后分析能力與局限(參見“討論”章節),最后展望未來研究方向(參見“結論”章節)。
計算機輔助多域作戰兵棋推演概念
圖1展示通用計算機輔助兵棋推演架構。決策者通過呈現戰場態勢的通用作戰態勢圖獲取信息,下達的命令經模擬環境處理。根據更新后的戰場態勢生成新通用作戰態勢圖。模擬環境狀態經“戰爭迷霧”功能過濾,剔除決策者尚未掌握的信息。我們將圖一所示兵棋推演改造為多域作戰兵棋面臨兩大挑戰:其一,多域作戰作為理解復雜環境并采取行動的理念,其兵棋場景構建與推演實施需真實反映現實復雜性,這是耗時耗力的過程——即便對于傳統藍紅單元地圖部署場景亦是如此。而構建元素互聯、激發決策思維的多域級復雜場景更加劇此過程強度。其二挑戰在于通用作戰態勢圖對決策者的反饋機制。隨著虛擬環境復雜性增加,決策者理解態勢并作出明智決策的難度預期增大,可能導致推演參與度下降(即挫敗感)(參見中村與契克森米哈伊2009年文獻)。基于這些挑戰,我們為多域作戰兵棋推演概念設定兩個設計目標:首要目標是豐富模擬環境,使其契合多域作戰場景需求;次要目標是輔助決策者理解態勢。下文闡述實現這兩項目標的方法路徑。
圖2:通用計算機輔助指揮控制兵棋推演循環
多域作戰(MDO)作為一種理論概念,旨在幫助理解復雜威脅環境并采取行動。要復現現實世界中的復雜性,需要采取超越傳統構造性模擬的方法步驟。本文論述我們模擬框架中引入的三項增強功能:(1)背景敘事生成;(2)額外實體與結構的自動生成;(3)效果模型集成。要素1和2將在圖二組件A部分詳細討論,要素3將在圖2組件B部分展開闡述。
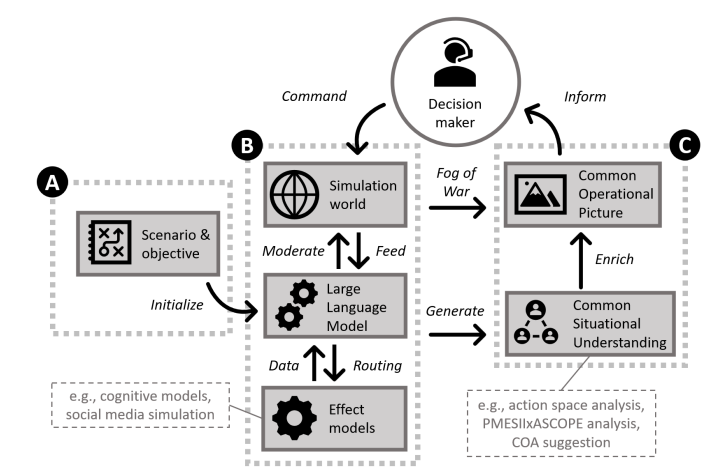
圖2:計算機輔助多域作戰兵棋推演概念總覽
本文提出一種創新性復合人工智能方法,整合了美國國防高級研究計劃局(DARPA)的“人類數字孿生智能體編隊評估與建模”(EMHAT)和“構建彈性信息生態系統”(BRIES)項目,實現對軍事行動場景中智能體人工智能工作流動態的精細化建模與嚴謹評估。現有系統缺乏同步建模具有豐富心理人口屬性與記憶表征的人類數字孿生,并評估多維性能指標的能力。復合人工智能解決方案通過專業化多智能體架構填補這一空白,為編隊效能與群體層級信息彈性提供前所未有的洞察力。在多場景中部署專用認知語言智能體:EMHAT支持基于多樣化人類數字孿生智能體的搜救模擬,嚴格測量編隊流程與狀態指標以提升協同效能;EMHAT實驗結果表明人類數字孿生個體能力與團隊導向如何影響任務績效。BRIES技術采用多智能體架構,配備“扭曲者”(對抗場景生成)、“探測者”與“防御者”(戰術評估響應)及“評估者”(因果分析)智能體以支持內容生成,隨后使群體數字孿生智能體接觸生成內容,測試模擬人群中的信息作戰策略。BRIES系統成功建模了群體層級對不同信息策略的響應差異,揭示認知扭曲等特定群體因素如何影響內容傳播行為與信息生態系統彈性。本研究提出可直接應用的復合人工智能建模與仿真框架,使指揮員與訓練人員能在高風險環境部署前量化評估軍事編隊績效、檢驗信息作戰效能并優化訓練方案。
現代軍事行動在關鍵領域面臨前所未有的挑戰:優化人機智能體編隊以提升戰術效能(瓦卡羅等人,2024年;沃爾科娃等人,2025年),構建抵御對抗性信息活動的彈性防御體系。正如北約“認知戰”概念所強調,未來沖突將日益把人類認知作為作戰域(北約盟軍轉型司令部,2023年)。現有人機編隊績效建模方法難以捕捉人格特質(阿卜杜勒拉赫曼等人,2024年)、信任動態(阮等人,2025年;涂等人,2025年;麥克達夫等人,2025年)與作戰效能間復雜相互作用——這些因素從決策支持到爭議環境中的協同行動均決定任務成敗。本文提出復合人工智能方法——整合前沿模型、智能體與工具的框架(扎哈里亞等人,2024年;沃爾科娃等人,2024年),通過兩個互補用例應對這些挑戰。該方法的核心是人類數字孿生智能體——整合人格特質、認知過程與行為模式的個體計算表征,能模擬虛擬環境中人類決策、情緒響應與社會互動(美國國家科學、工程與醫學院,2024年)。EMHAT實現人類數字孿生智能體的搜救模擬,嚴格測量編隊流程與狀態指標以提升協同效能;BRIES技術則通過多智能體架構支持信息活動生成,并建模群體人類數字孿生行為、態度與脆弱性。通過將具有心理人口屬性與記憶表征的編隊及群體層級人類數字孿生整合,建模仿真框架配備嚴謹因果驗證工具,使指揮員能在高風險環境部署前量化評估編隊績效、檢驗信息作戰效能并優化訓練方案。
相關研究現狀
當前基于前沿模型與大型語言模型驅動智能體的人類社會行為仿真方法在規模、保真度與真實驗證方面存在根本局限(帕克等人,2024年;阿卜杜勒拉赫曼等人,2024年)。傳統態度與觀點動態建模嚴重依賴社交媒體數據,將分析局限特定線上群體,且缺乏社會經濟與健康指標的多模態背景(沃爾科娃等人,2021年)。這些局限在滿足“動態人機編隊系統中人工智能作戰化”(卡薩尼等人,2025年)的軍事需求及開發可擴展主動解決方案時尤為突出。大型語言模型驅動智能體的最新進展顯現在人類行為仿真領域的重大突破。帕克等人(2023年)開創性提出“生成式智能體”實現逼真仿真,通過記憶流與反思機制涌現社會行為。在此基礎上,SOTOPIA(周等人,2024年)通過目標驅動交互評估社會智能,其最新擴展SOTOPIA-S4(周等人,2025年)提供用戶友好系統支持靈活可定制的大規模社會仿真。這些進展的關鍵在于塑造智能體人格的能力——BIG5-CHAT(李等人,2025年)證明基于人類基礎數據訓練可創建與心理學框架一致且具穩定人格特質的大型語言模型。CAMEL(李等人,2023年)等附加框架展現在角色化場景中涌現的協同行為。包括AI小鎮(2023年)、OASIS(湯等人,2024年)及谷歌DeepMind的Concordia(韋日涅夫采夫等人,2023年)在內的群體級系統支持數百智能體的觀點動態與社會影響建模。AgentClinic(2024年)與CharacterEval(2024年)等專業框架通過社會真實性與目標達成度的復雜評估指標推進領域特異性行為建模。然而,現有軍事認知安全框架(北約盟軍轉型司令部,2023年;北約戰略傳播卓越中心,2021年;菲茨帕特里克等人,2022年)僅提供戰略指導卻缺乏可擴展技術實現,而產業界聚焦人工智能助手而非防御關鍵的群體行為仿真工具(沃爾科娃等人,2024年)。當前系統無法在評估多維性能指標的同時建模具有豐富心理人口屬性與記憶表征的人類數字孿生(美國國家科學、工程與醫學院,2024年),這一關鍵空白由復合人工智能方法通過集成建模、仿真與因果評估能力予以填補。
方法
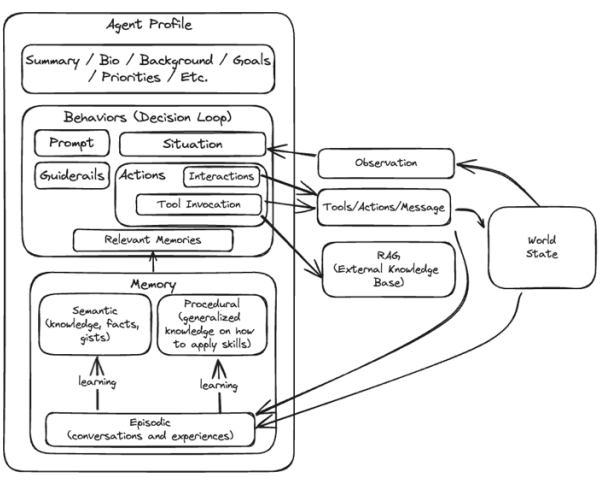
圖1. 人類數字孿生架構將智能體檔案(生物特征、目標)與行為決策循環相結合,該循環通過提示與防護欄處理情境以生成行動與工具調用。記憶系統整合了語義記憶(事實)、程序性記憶(技能)與情景記憶(經歷)及雙向學習路徑。基于外部檢索增強生成的知識檢索與世界狀態同步實現了情境感知、人格一致的行為。
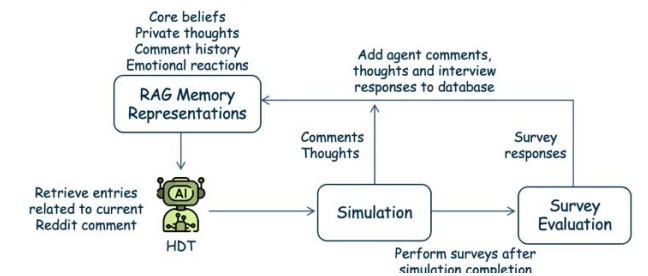
圖2. 編隊與群體仿真。具有核心信念、思想、通信歷史與情緒反應的人類數字孿生智能體,在接觸Reddit或團隊通信時從其檢索增強生成記憶庫中檢索相關條目。仿真引擎協調智能體互動(評論、思想),同時捕獲測量內容信任度與分享意圖的帖后調查響應,用于評估信息彈性與編隊效能策略。
- 個體與群體數字孿生開發與仿真
該方法采用多階段流程構建人類數字孿生,以精確模擬操作環境中人類的認知、情緒與行為響應。圖1所示的人類數字孿生架構整合了多個互連組件,旨在捕捉人格特質、認知過程與情境動態間的微妙相互作用。檔案生成系統實施分層構建流程,綜合多維度心理人口屬性。采用OCEAN大五人格框架(巴里克與芒特,1991年;保諾寧與阿什頓,2021年)作為基礎人格模型,生成符合正態分布的特質分數。為保持真實的特質間關系,實施了源自人格研究大規模元分析的相關矩陣。例如,高外向性分數與高開放性分數相關,而高宜人性與低神經質相關。BRIES場景中的認知扭曲分配(尤里卡與迪托馬索,2005年)基于OCEAN分數加權,創建心理一致的人類數字孿生檔案。采用GPT-4o(開放人工智能,2024年)作為檔案生成的主要語言模型,提供包含核心人口統計與人格屬性的種子數據。該模型接收包含基礎OCEAN分數與衍生認知模式、含年齡職業教育水平的人口統計錨點、校準至群體分布的社會經濟指標、及基于人格行為相關性(林奇等人,2025年)的行為傾向的結構化提示。
EMHAT仿真框架實例化三個專用人類數字孿生,配置作戰搜救任務必備的 distinct 操作角色:醫療專家、戰斗工兵與撤離運輸員,每個智能體體現對任務成功至關重要的角色專屬能力(黃等人,2022年)。這些角色不對稱性創建了依賴關系——例如工兵獨有的廢墟清理能力形成了需要協同編隊努力的天然瓶頸。EMHAT智能體通過集成數據流(含編隊通信、可操作導航指令集與動態狀態信息)保持環境感知。EMHAT智能體執行的行為包括戰術信息交換、空間導航規劃、任務目標優先級排序與情境數據分析——所有決策均受其配置的人格檔案與動態演化的智能體間信任關系(阮等人,2025年)影響。
圖2所示的BRIES群體仿真將人類數字孿生智能體部署于Reddit風格討論帖中,使其基于配置身份自主進行社交媒體互動。當遭遇帖子與評論時,智能體使用檢索增強生成從其個體向量數據庫檢索相關記憶,實現基于過往互動、存儲思想與情緒反應的情境感知響應。智能體隨后執行決策協議以點贊、點踩或撰寫回復,系統實施通知機制在貢獻獲回應時提醒智能體,為其基于人格檔案選擇持續互動或戰略靜默提供機會。在整個互動過程中,智能體持續生成并存儲校準至其身份規格的思想與情緒反應,構建影響未來行為模式的豐富記憶庫。帖子互動結束后,每個智能體接受結構化帖后訪談評估其內容認知立場,包括對帖子真實性的信任度、與他人分享帖子的可能性、與親友討論話題的傾向及在其他社交媒體平臺放大內容的意愿,從而捕獲即時行為響應與反映不同人格配置如何影響信息生態動態的下游傳播意圖。
- 個體與群體數字孿生評估
從仿真通信中提取社會-情緒-認知構念
BRIES與EMHAT實驗均采用一套綜合性人工智能驅動分析工具,自動從編隊與群體通信中提取并分析社會-情緒-認知構念。這些(沃爾科娃等人,2021年)總結的分析包括:通過贊同、建議與希望表達等特定策略識別意圖與情緒的同理心檢測模型(西等人,2019年);評估內涵、觀點、態度(拉什金等人,2016年)、跨傷害、公平、純潔、權威與內群體五維度道德價值(格雷厄姆等人,2013年)及主觀性模式(拉什金等人,2017年)的社會認知分析;以及使用基于DistilBERT的情感分析模型(桑等人,2020年)、Detoxify毒性檢測(哈努與統一團隊,2020年)與情緒識別(薩瓦尼,2024年)的情緒分析。
數字孿生仿真的因果研究
針對群體層級信息彈性(BRIES)與個體人類數字孿生編隊(EMHAT)的數字孿生仿真因果評估采用因果分析方法評估并解釋仿真結果。遵循珀爾的因果框架(珀爾,2009年;珀爾與麥肯齊,2018年),通過NOTEARS算法與CausalNex包(量子黑實驗室,2020年;鄭等人,2018年)利用結構方程模型發現因果結構,聚焦處理(如接種策略或編隊干預)與結果(如團隊績效指標、社會-情緒-認知構念)的同時阻斷處理間傳入邊以避免混淆效應。此外,使用EconML的因果森林進行平均處理效應估計(巴托基等人,2019年;切爾諾茹科夫等人,2016年;瓦格與阿西,2018年),從智能體流水線分析處理、結果與協變量以隔離個體處理效應。該雙重方法價值顯著:結構方程模型捕獲心理與編隊維度的復雜相互關系與級聯效應——揭示說服技巧或團隊動態如何在網絡化響應中運作——而平均處理效應在受控情境中精確隔離直接因果影響。對BRIES群體仿真,此法可量化不同接種策略如何影響群體對抗信息攻擊的彈性;對EMHAT編隊仿真,則可測量特定干預(如個體能力與團隊導向)如何影響人類數字孿生編隊協調、通信模式與任務成功,最終規模化優化認知安全與操作層級編隊績效(沃爾科娃等人,2021年)。
時間序列推理將時間視為一等公民維度,并將中間證據直接融入答案之中。本綜述對該問題進行了定義,并按照推理拓撲結構對現有文獻進行了組織,分為三類:一步到位的直接推理、帶有顯式中間步驟的線性鏈式推理,以及包含探索、修正與聚合的分支結構推理。我們將這些拓撲結構與該領域的主要目標交叉對應,包括傳統的時間序列分析、解釋與理解、因果推斷與決策、以及時間序列生成。同時,我們提出了一套緊湊的標簽體系來覆蓋這些維度,并捕捉分解與驗證、集成、工具使用、知識訪問、多模態、智能體循環以及大語言模型對齊機制等要素。
方法與系統在跨領域的回顧中展示了不同拓撲所能實現的能力及其在真實性(faithfulness)或魯棒性方面的局限性,同時提供了經策劃的數據集、基準和相關資源來支持研究與部署(配套倉庫見 https://github.com/blacksnail789521/Time-Series-Reasoning-Survey)。我們強調了保持證據可見且時間對齊的評估實踐,并提煉出關于如何將推理拓撲與不確定性相匹配、如何通過可觀測的工件實現扎根、如何規劃應對分布漂移與流式數據,以及如何將成本與延遲作為設計預算的指導原則。 我們特別強調,推理結構必須在扎根與自我糾錯的能力與計算成本和可復現性之間取得平衡;而未來的進展可能取決于能夠將推理質量與效用掛鉤的基準,以及能夠在感知分布變化、流式與長時間跨度設定下權衡成本與風險的閉環測試平臺。綜合來看,這些方向標志著研究正從狹義的準確性轉向大規模的可靠性,推動系統不僅能分析,還能以可追溯的證據和可信的結果來理解、解釋并作用于動態世界。
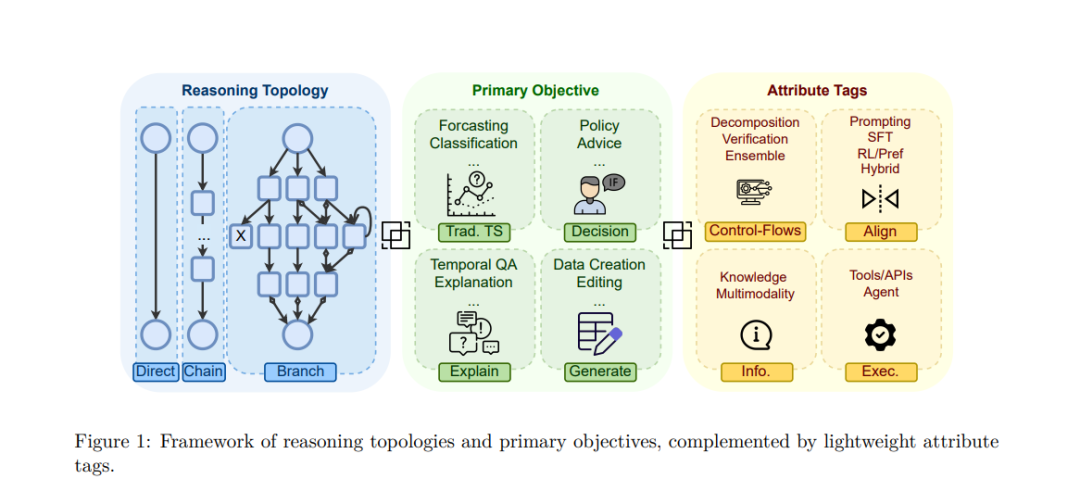
時間序列數據在日常生活中極為常見,它們記錄了變量隨時間的演化與交互,涉及金融、醫療、能源、氣候、交通和制造流程等領域 (Chang et al., 2025c; Ou et al., 2024; Chang et al., 2025b; 2024c; Zhao et al., 2020; Cao et al., 2024b; Niu et al., 2024; Cao et al., 2022; Li et al., 2025c)。經過數十年的發展,時間序列分析已經成為監測、預測、診斷與決策的核心方法之一,并廣泛應用于風險建模、患者監護、需求預測以及預測性維護等領域 (Chang et al., 2024a; Lin et al., 2024; Chang et al., 2024b; Lo et al., 2024; Cao et al., 2020)。現有的時間序列綜述大多聚焦于建模與算法方法,包括深度學習預測方法 (Lim & Zohren, 2021; Torres et al., 2021; Mahalakshmi et al., 2016; Liu et al., 2021; Benidis et al., 2022)、基于 Transformer 的架構 (Wen et al., 2023)、異常檢測 (Zamanzadeh Darban et al., 2024)、分類 (Ismail Fawaz et al., 2019)、聚類 (Liao, 2005)、模式發現 (Torkamani & Lohweg, 2017)、變點檢測 (Aminikhanghahi & Cook, 2017)、序列分段 (Keogh et al., 2004)、壓縮 (Chiarot & Silvestri, 2023) 以及數據增強 (Victor & Ali, 2024; Wen et al., 2021)。這些工作主要關注如何在處理序列化時間數據時提升預測精度、表示能力與效率。 然而,許多新興應用的需求遠超預測本身。諸如個性化醫療、自適應風險管理以及自主系統等領域,需要模型不僅能夠解釋輸出、進行反事實推理,還要能在多種備選行動方案中作出決策。這些需求凸顯了一個事實:推進時間序列分析的發展,必須依賴結構化且可靠的推理。盡管應用廣泛,現有文獻幾乎未涉及時間序列中的推理、解釋或基于智能體的決策。就我們所知,目前尚無工作系統性地探討如何在時間序列方法中實現高層次推理或面向政策的行動。 大語言模型(LLMs)的興起為該領域帶來了另一個關鍵轉折點。LLMs 不僅能夠進行模式擬合,還能夠展現逐步推理過程 (Ke et al., 2025; Zhang et al., 2024b; Huang & Chang, 2023; Chu et al., 2024; Zhang et al., 2025e; Yang & Thomason, 2025; Xiao et al., 2024),提出因果假設 (Li et al., 2025d; Liu et al., 2025f; Kiciman et al., 2023; Zhang et al., 2022; Cao et al., 2023),并與外部工具和環境交互 (Shen, 2024; Ferrag et al., 2025; Yang et al., 2025a; Chen et al., 2025b)。當 LLM 被納入智能體系統后,它們獲得了規劃 (Huang et al., 2024; Wei et al., 2025)、反思 (Renze & Guven, 2024; Ji et al., 2023) 與持續適應 (Fujii et al., 2024; Shi et al., 2025) 的能力,從而將時間序列建模從靜態預測轉變為交互式與可解釋的過程 (Ye et al., 2024)。這一轉變拓展了下游任務的空間:模型不僅要做預測或異常檢測,還需要支持因果分析、自然語言推理、時間信號的模擬與編輯,以及政策驅動的決策。 基于這一轉型,本綜述以三大交叉趨勢為基礎,來描繪未來的發展格局。首先,時間序列數據日益普及并愈發重要,推動實際系統在不確定性下對清晰性、通用性與強決策能力提出更高要求。其次,LLM 與多模態 LLM 已展現出前所未有的推理與泛化能力,使得時間序列問題能夠以自然語言與符號形式重新表述。第三,基于 LLM 的自主智能體興起,使得模型不僅能夠分析時間序列,還能通過模擬、干預或迭代決策循環直接作用于時間序列。受這些發展驅動,我們定義并研究時間序列推理(Time Series Reasoning, TSR):即大語言模型在時間索引數據上顯式執行結構化推理過程的方法,該過程可結合多模態上下文與智能體系統加以豐富。本綜述提出了該領域的首個系統性分類法,圍繞不同的推理拓撲與主要目標展開,并輔以輕量級屬性標簽來捕捉控制流操作符(如分解、驗證與集成)、執行者(包括工具使用與智能體循環)、模態與知識訪問,以及特定于 LLM 的對齊機制,如圖 1 所示。 本綜述的主要貢獻如下: (i) 我們首次提出了時間序列推理的系統化分類框架,沿兩條互補軸展開:推理拓撲(執行結構)與主要目標(任務意圖),并進一步結合輕量級屬性標簽,涵蓋控制流操作符、執行者(工具與智能體循環)、模態與知識訪問以及 LLM 對齊機制。 (ii) 我們提供了一個綜合性回顧,不僅分析了研究論文中跨越推理拓撲與目標的模式,還對補充性工作進行歸類,如數據集、基準、綜述、教程、立場與愿景論文,凸顯這些工作如何支持并塑造時間序列推理的發展。 (iii) 我們指出了若干開放問題,包括:評估與基準構建、多模態融合與對齊、檢索與知識扎根、長上下文推理、記憶與效率、智能體控制與工具使用,以及因果推理與決策支持——并據此制定了未來時間序列推理的研究議程。 本文的其余部分組織如下:第 2 節形式化了時間序列推理的概念,并介紹了我們的分類體系、決策框架和系統化標注流程,用以將每篇論文注釋為推理拓撲、主要目標與屬性標簽。第 3–5 節深入分析三類推理拓撲;第 6 節綜述了數據集、基準、評估協議與輔助資源;第 7 節總結開放問題與未來研究方向。整體而言,本文確立了一個統一的分類體系,對一百余篇論文進行了可復現的標注,并綜合了方法學趨勢與挑戰,旨在為開發新型時間序列推理系統的研究者和尋求結構化指南的實踐者提供參考。 


在人工智能能力快速發展與倫理審查日益嚴格的時代背景下,對透明且可信的機器學習解決方案的需求比以往任何時候都更加迫切。在醫療、刑事司法與金融服務等高風險領域,復雜的 AI 系統被廣泛部署,并可能對人類生活產生深遠影響。然而,由于其決策過程高度不透明,這些系統的結果往往難以為受其影響的個體所理解。這種缺乏透明性的現象不僅引發了倫理擔憂,也為實踐者帶來現實挑戰——他們必須確保這些系統在真實場景中的運行符合預期。 本論文探討了在機器學習中逼近不同類型“真理”的挑戰,并提出了方法學改進,以推進局部可解釋性與因果推斷的發展。可解釋人工智能(XAI)方法旨在揭示黑箱模型的內部運作機制,而因果推斷技術則致力于揭示驅動觀測現象的底層機制。二者結合形成了一個理解的綜合框架——XAI 解釋我們對現實的模型,而因果推斷解釋現實本身。貫穿全文,我關注于改進多種真理概念的逼近:因果真理、模型真理以及真實數據分布。 我的研究首先針對局部模型解釋的基礎性局限提出改進,提出 Neighbourhood SHAP 值,該方法利用局部參考分布提供更有意義的特征歸因,更好地反映局部模型行為,并展現出更強的對抗分類器魯棒性。在此基礎上,我進一步提出 Path-Wise Shapley 效應(PWSHAP),通過將用戶定義的因果結構與 Shapley 值結合,評估變量在特定因果路徑中的影響,從而連接預測建模與因果理解。超越模型解釋邁向直接因果推斷,我提出 BICauseTree,一種可解釋的平衡方法,用于識別局部自然實驗發生的聚類,檢測存在正性假設違背的子群體,同時明確界定有效推斷群體。最后,我探討了在因果研究中安全評估數據集價值的挑戰,提出了 期望信息增益(Expected Information Gain)框架,允許數據提供方在不泄露敏感信息的前提下評估數據合并的潛力。 總體而言,這些方法學創新在可解釋 AI 與因果 AI的理論理解與實踐應用上均有所推進,提供了提升透明性、改進決策支持、并增強 AI 系統在高風險領域中可信度的解決方案。

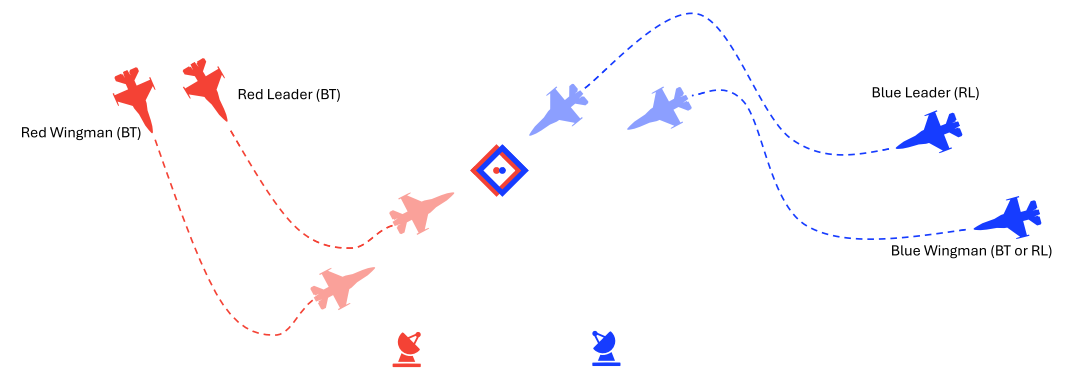
本研究探索超視距空戰仿真模擬,重點聚焦涉及自主智能體的二對二作戰場景。超視距空戰的交戰階段呈現復雜且不可預測的態勢,因其難以預判敵方戰機行為與戰術決策結果,尤其在多智能體環境中更為凸顯。深度強化學習技術作為一種前景廣闊的解決方案,能使智能體從動態環境中自主學習。據戰斗機飛行員確認,集體態勢感知(即理解友軍與敵方的空間分布及方位)對執行協同戰術機動至關重要。本研究的主要貢獻在于開發了AsaGym庫——專為超視距場景下基于深度強化學習的戰斗機智能體開發與訓練而設計的工具庫。通過案例研究展示其應用價值:采用基于集體態勢感知的獎勵函數促進協同作戰,并比較不同深度強化學習算法以評估其培育協作行為的能力。研究成果凸顯了深度強化學習在應對現代空戰復雜性方面的潛力,為多智能體超視距場景下發展更具適應性與實效性的戰術提供支持。
空戰是復雜動態的作戰場景,要求嫻熟的飛行員快速決策以獲取戰術優勢[1]。超視距空戰特指飛行員無法目視敵機距離范圍內發生的交戰行動[2][3]。雖然部分空戰仍發生在視距內,但多數交戰始于超視距階段。此階段通常最為關鍵,因其可為后續戰斗階段創造優勢或制造困難。飛行員面臨的核心挑戰在于機動規劃,這體現了其戰術思維能力并決定交戰結果[4]。
超視距空戰的計算機仿真能復現多樣態勢,助力測試新戰術、傳感器與武器系統[5]。這些仿真的最大難點在于模擬飛行員在全戰斗階段的復雜行為。這些決策包括適應新態勢、與友軍協同執行策略以及精準把握導彈發射時機。
本研究探索自主智能體學習超視距交戰機動的能力。交戰涉及操縱戰機獲取對敵優勢,即將敵方定位在己方導彈有效射程(稱為武器交戰區)內,同時確保自身處于敵方武器交戰區外[6][7]。當存在多個敵方目標時,交戰階段復雜性顯著增加。
強化學習技術是該問題的前瞻性解決方案,它使自主智能體能從挑戰性經驗中學習。強化學習是一種機器學習方法,自主智能體通過與環境交互學習優化決策。智能體因其行動獲得獎勵或懲處,并隨時間調整策略以最大化累積獎勵[8]。深度強化學習是強化學習的進階形式,利用深度神經網絡管理復雜環境,使智能體能在動態不確定條件下(如超視距空戰)做出決策[9]。
在此背景下,現有空戰仿真環境常缺乏模塊化設計、多智能體深度強化學習實驗支持或融入作戰洞察(如友軍與敵機空間協同)的機制。
因此,本研究的主要貢獻包括:
? 開發AsaGym庫——用于超視距空戰中基于深度強化學習的自主戰斗機智能體仿真與訓練,并通過案例研究展示其在使用促進協同與態勢感知的獎勵設計中的應用。
此外,提供以下具體貢獻:
? 設計面向任務的獎勵函數,基于友軍與敵方的空間關系激勵智能體協作行為;
? 融入巴西空軍戰斗機飛行員作為領域專家提供的作戰知識,其強調空間感知對超視距空戰協同機動的重要性;
? 對四種先進深度強化學習算法——近端策略優化、軟演員-評論家、雙延遲深度確定性策略梯度以及優勢演員-評論家——在模擬超視距空戰場景交戰階段的應用進行比較評估。
本研究的后續結構如下:第二章概述相關工作,重點評述深度強化學習在超視距空戰仿真中的既往研究;第三章詳述方法論,包括用于表征超視距空戰交戰階段的深度強化學習模型設計,以及用于訓練評估的實驗配置;第四章討論實驗成果與分析,深入解析智能體在不同場景下的性能表現;最終,第五章總結核心發現并展望未來研究方向。
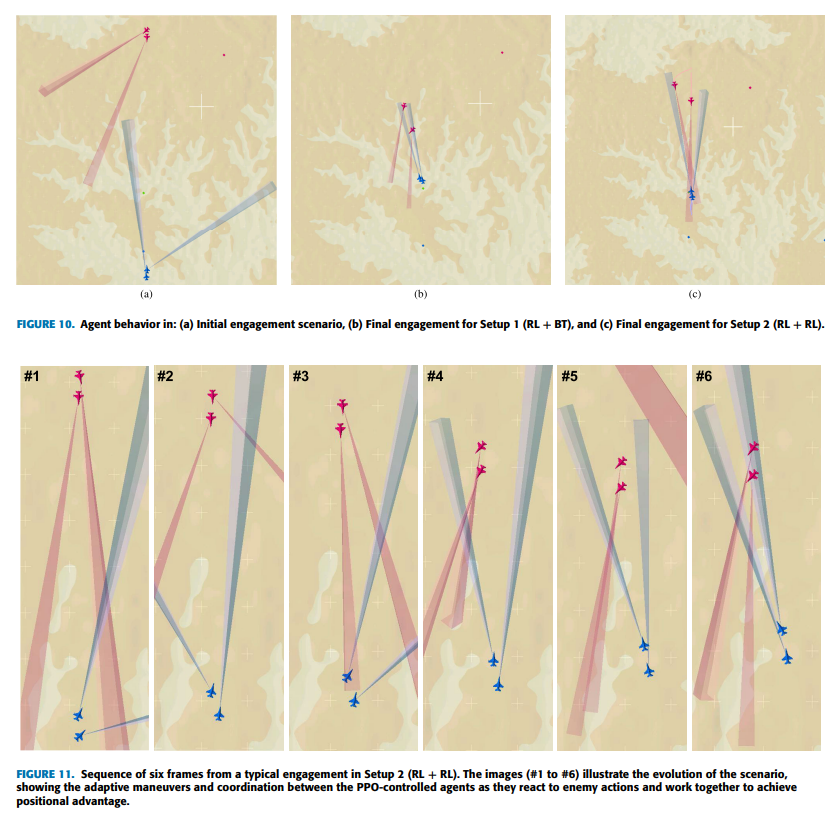

圖:美國海軍陸戰隊第一陸戰團第三營士兵在夏威夷海軍陸戰隊基地卡內奧赫灣舉行的“島嶼掠奪者”演習中使用海軍陸戰隊通用手持終端。2023屆海軍研究生院畢業生、海軍陸戰隊上尉瑞安·赫爾姆,研發了一套突破性戰術規劃工具即將成為該手持終端的標準配置。
概述
美國海軍陸戰隊上尉瑞安·赫爾姆基于對實戰能力缺口的切身認知展開研究,催生了一項顛覆性技術成果,即將重塑美國海軍陸戰隊艦對岸戰術作戰的規劃模式。其解決方案“增強偵察與態勢評估系統”(ARES)應用程序是一款創新數字工具,旨在將復雜突擊任務的規劃時間從數月壓縮至數秒,實現自動化快速生成。
背景
“增強偵察與態勢評估系統”的靈感可追溯至2020年美軍“鋼鐵騎士”演習。時任海軍陸戰隊中尉兼代理連長的赫爾姆為確定空中突擊最佳直升機著陸場,耗時近兩個月進行計算。此次經歷令他深刻反思:“若在駐防環境確定直升機著陸點都需兩月,實戰中在戰艦受敵條件下執行該任務又將如何?”
赫爾姆指出,地面部隊機動規劃是高度依賴人工的流程,需綜合權衡地形分析、射界范圍、掩蔽條件、條令要求等多重因素,且常面臨巨大時間壓力。盡管任務規劃過程中可獲取地理空間情報,但一線終端用戶需在信息匱乏環境下快速決策,這直接關乎海軍陸戰隊員的生命安全。
認識到該能力缺口后,其著手開發曾為初級軍官時夢寐以求的戰術決策支持系統——通過數字化轉換將地面作戰機動規劃的‘科學’轉化為快速可執行的洞察力。
赫爾姆在海軍研究生院學習郭晨中,每門課程相繼為增強偵察與態勢評估系統框架注入新概念、新工具與新技術:微積分復習助力優化戰場空間地理分析;編程知識支撐系統框架構建與地理空間數據采集;機器學習技術實現直升機著陸場智能判定;網絡理論則賦能路徑規劃工具開發。
“增強偵察與態勢評估系統(ARES)”架構
該系統包含四大核心模塊:基于地形與環境數據識別適宜著陸場的直升機著陸場探測工具;規劃著陸場至目標區域最優地面機動路線的戰術尋路工具;提升作戰效能的部隊編組與邊界配置戰場空間幾何優化工具;整合前述模塊生成可執行方案的行動方案生成工具。
整體而言,該系統通過直升機著陸場預測、路線規劃與直射火力幾何分析賦能機動指揮官,借時間節省拓展決策空間,并兼容安卓與桌面端現有自動化平臺實現即裝即用。
構建的系統能綜合考量投送位置、機動走廊、敵軍可視域與火力幾何的所有組合,以推薦最優行動方案。指揮官可擺脫手工繪制幾何圖形與評估射界的工作負荷,聚焦應急預案、下屬單位行動轉換及敵軍反應等關鍵環節。
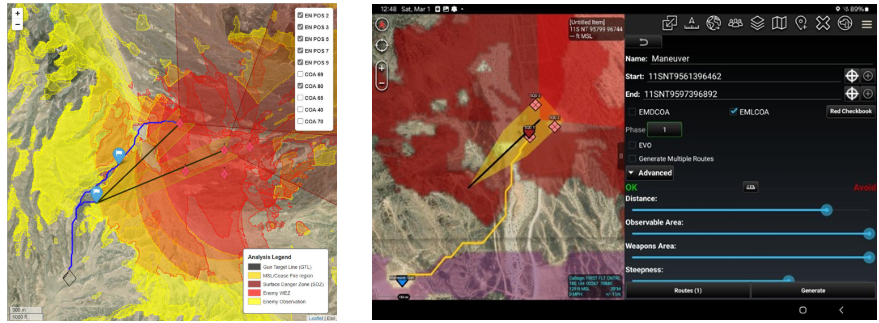
圖:"增強偵察與態勢評估系統(ARES)"戰術規劃工具最新版本測試開發期間,系統生成推薦行動方案的界面截圖。
“增強偵察與態勢評估系統”應用效果顯著
為驗證系統效能,赫爾姆在加利福尼亞州彭德爾頓營地通過空中突擊課程測試系統生成方案與現地勘察設計的等效性。針對著陸場選擇、路線規劃、支援機槍陣地與目標進入點的組合,模型為該場景生成78萬5664種決策組合。結合用戶偏好與條令要求,系統最終提煉出220項行動方案供決策者優選。
此創新成果廣受認可。2022年11月,赫爾姆入選美海軍信息戰中心太平洋分部杰出研究員計劃(當屆僅五名學員獲此殊榮),由此獲得關鍵資金支持,用于在彭德爾頓營地與海軍陸戰隊戰術系統支持活動中心開展系統實地測試,并獲該中心導師團隊研究指導。2023年6月畢業時,赫爾姆榮獲軍事作戰研究學會蒂斯代爾獎——該獎項表彰“通過研究生研究顯著提升軍隊作戰效能與現役/近期裝備運用效率的杰出成就”。

圖:美國海軍陸戰隊上尉瑞安·赫爾姆于2023年6月畢業于海軍研究生院作戰研究專業,并被授予軍事作戰研究學會斯蒂芬·蒂斯代爾研究生研究獎。該獎項授予其學位研究對美國及盟國國家安全具有最高即時或近期價值的作戰研究專業畢業生。
這份投資確顯成效。赫爾姆畢業后不久,美海軍陸戰隊第一營第五登陸隊在部署前訓練中運用增強偵察與態勢評估系統獨立版應用程序支持多項艦對岸機動行動,完成首次實戰驗證。反饋結果極為積極。
該部隊指揮官在事后審查報告中指出兩大關鍵發現:一是系統能快速生成非顯而易見卻最優的行動方案,最大化掩蔽效果、火力幾何與兵力分配;二是需通過正規軟件開發周期整合政府數據源并構建穩健用戶界面。
該指揮官強調,系統為步兵營(從初級情報分析員至連長與作戰參謀)帶來巨大價值,其應用不僅限于垂直突擊偵察,還可通過推薦敵方可能(最優)行動方案,協助所有進攻行動及防御安保行動規劃。
目前,增強偵察與態勢評估系統已作為核心組件集成至美海軍研究署作戰人員代碼34項目下屬的“小隊任務規劃器”與“高層級任務規劃器”等大型規劃軟件。這些應用程序提供流線型數字規劃,而本系統提供了自動化機動生成的關鍵特性。

圖:美國海軍陸戰隊預備役人員主導的"海軍陸戰隊創新單元"及其下屬"海軍陸戰隊軟件工廠"正與海軍研究署協同開發赫爾姆"增強偵察與態勢評估系統"戰術規劃工具的子系統組件,包括與飛行員及艦隊用戶共同開展直升機著陸場探測模塊的測試驗證工作。
同步地,海軍陸戰隊創新單元(預備役主導的創新團隊)持續與海軍研究署協同迭代系統子模塊。據該單元海軍陸戰隊編碼團隊負責人戴維·麥吉少校透露,直升機著陸場探測模塊已獲飛行員與艦隊用戶驗證,今夏將部署至所有海軍陸戰隊配發安卓平板。
該工具為飛行員或步兵規劃人員提供滲透、撤離或傷員后送規劃支持,是地面緊急預案制定的重要資源。
隨著海軍陸戰隊深入數字化作戰時代,增強偵察與態勢評估系統等工具或將成為新標準起點:由海軍陸戰隊自主設計、數據驅動的決策系統,在日益復雜的戰場空間中降低認知負荷并加速決策循環。
參考來源:美國海軍
電子戰能力的快速發展暴露了傳統無人機通信系統的關鍵脆弱性,特別是那些依賴射頻鏈路的系統。在對抗環境中,基于射頻的無人機易受干擾、欺騙和攔截,這可能影響作戰效能和任務安全。本文探討光纖系留無人機技術作為韌性替代方案的興起,該技術顯著增強信號抗擾性、數據安全性和實時控制能力。研究概述了與這些系統相關的技術演進、軍事相關性和設計挑戰,特別強調其在電子戰場景中的部署。此外,本文提供與傳統無人機通信框架的對比評估,隨后評估全球和國家發展、網絡安全考量及未來趨勢。
索引術語:光纖無人機、電子戰、系留無人機、射頻脆弱性、安全通信、抗干擾能力、國防技術

A. 引言與概念框架
A.1 歷史背景與技術演進
光纖通信的基本概念由高錕和喬治·霍克漢姆于1966年提出,他們證明去除雜質后玻璃纖維能以低于20分貝/公里的衰減傳導光信號。其里程碑論文指出"玻璃材料纖維代表一種可行的實用光波導,具有作為新型通信媒介的重要潛力"。首次大規模試驗(稱為希欽-史蒂文納吉實驗)于1977年在英國進行,證明長距離光纖鏈路對電信應用具有可行性和可靠性。此后不久,美國海軍開始在艦艇上部署光纖系統,利用其抗電磁干擾和射頻脆弱性的特性。最近,俄烏沖突見證了光纖導引無人機的部署。這些通過數公里長光纖線軸控制的系留無人機具備抗射頻干擾能力和增強的視頻保真度。據斯波特全球公司報道,俄羅斯和烏克蘭自2024年3月均已研制出光纖導引無人機系統原型。此外,這些無人機在戰場行動中發揮關鍵作用——特別是在俄羅斯庫爾斯克攻勢期間——因為"它們不受電子戰影響,突破無線電視距并穿透干擾防御"。這些里程碑——從理論基礎、早期現場試驗到現代軍事應用——凸顯了光纖技術在實現安全、抗干擾通信方面的關鍵作用。
A.2 傳統無人機通信的挑戰
傳統無人機主要利用射頻通信通道進行指揮、控制和數據鏈傳輸。然而,這些系統高度易受干擾、欺騙和電磁干擾影響,可能危及任務成功與安全。實驗研究表明,低成本軟件定義無線電干擾器能夠在最遠5公里距離上破壞無人機控制和遙測通道,顯著降低對抗環境中的系統可靠性。全球定位系統欺騙攻擊(操縱定位和定時信號)也在真實場景中得到驗證,允許對手重定向無人機或誘發失控狀況。為緩解這些威脅,研究人員探索了多種對策:
跳頻擴頻技術:自適應跳頻等技術可保持鏈路韌性,但通常需要大量協調和機載處理能力,超出輕型無人機承載范圍。 博弈論信道選擇:基于斯塔克爾伯格博弈的方法在仿真和有限現場試驗中展現出有效抗干擾性能,但在動態環境中可能出現延遲問題。 多傳感器導航:結合慣性測量單元與視覺系統可緩解全球定位系統欺騙。但此舉增加系統復雜性和重量,影響飛行續航。
來自烏克蘭沖突的現場報告進一步強調這些脆弱性。《衛報》指出,由于前線區域持續存在射頻干擾,俄烏無人機操作常被迫改用光學導航。這凸顯了對光纖系留通信系統等安全、物理穩健替代方案的需求。這些挑戰明確表明:盡管逐步改進,傳統射頻配置本質上仍暴露于現代電子戰戰術之下。
A.3 光纖無人機技術的興起
光纖系留無人機的出現標志著無人機操作的范式轉變。該系統最初由俄軍于2024年初部署,并迅速被烏克蘭操作員采用,其使用超細光纖電纜(范圍5公里至超20公里)傳輸控制命令和實時高清視頻,同時保持對射頻干擾的免疫力。現場報告同時強調戰略優勢與實操限制。據《福布斯》報道,德國原產"HCX"系留無人機等系統憑借光纖系纜"免疫所有電子戰",但存在有效載荷降低和需精密線纜管理的問題。同樣,《戰區》專欄深度現場訪談顯示,烏克蘭光纖導引無人機部隊在庫爾斯克突破干擾系統,實現超無線電視距限度的遠程打擊。理論方面,《自然·科學報告》研究表明光學系纜不僅能傳輸數據,還可輸送千瓦級電力——可能實現持續飛行——盡管拉伸強度和安全標準等挑戰依然存在。與此同時,戰略與國際研究中心的分析詳細描述了當前作戰能力:據報告部分烏克蘭光纖系留無人機實現最遠50公里范圍,但速度和有效載荷能力降低。這些進步展示清晰發展軌跡:光纖導引無人機系統優先考慮抗干擾、高保真通信和延長續航,以重量和機動性為代價——這種權衡在現代對抗戰場中證明具有戰略優勢。
C. 軍事與作戰應用
C.1 小型戰術無人機的軍事應用
小型戰術無人機革命性改變現代戰場,在高威脅環境中提供實時情報、監視和偵察能力。這些通常低于25公斤的平臺,現被視為班排級力量倍增器。在烏克蘭沖突中,低成本商用四旋翼無人機已證明對偵察和目標定位有效。"蜘蛛網行動"期間,烏克蘭部隊運用數百架簡易消耗型無人機摧毀超20架俄羅斯轟炸機并壓制敵方空中行動,展示無人機的不對稱影響。北約部隊正快速整合小型無人機系統到常規訓練和戰術條令中。"活躍軍刀25"演習中,前線單位演練快速無人機部署、反無人機戰術及與地面機動無縫集成——標志作戰規劃的范式轉變。總體而言,經濟型智能小型無人機系統的普及正重塑戰術條令:它們增強態勢感知、以最小成本實現精確瞄準,并在戰場引入新型分布式殺傷模式。
C.2 光纖實現的抗電子戰策略
電子戰主要通過干擾和攔截破壞基于射頻的無人機。光纖系留無人機依靠物理光學鏈路規避這些威脅,該鏈路完全免疫電磁干擾且無法遠程破壞。這些系統常采用光纖供電和光纖無線電技術,通過同一光學介質安全同步傳輸電力和數據——消除無線脆弱性。在實驗試驗中,新藤等人演示了完全通過光纖供電和控制的系留無人機,即使在模擬干擾條件下也能保持穩定飛行和實時視頻傳輸而無須射頻信號。此外,基于無人機的光纖量子密鑰分發新興研究顯示無人機通信中不可破加密的潛力,盡管這些系統仍處于原型階段。
C.3 全球與土耳其電子戰能力
電子戰已成為全球大國部署先進系統以主導電磁頻譜的戰略領域。例如,俄羅斯使用克拉蘇哈-4型等地面綜合系統,能夠在超300公里距離干擾機載雷達和衛星系統——在烏克蘭和敘利亞得到驗證。美國部署多域電子戰平臺包括EA-18G咆哮者電子攻擊機和天基干擾器,強調北約部隊內的集成電子戰能力。土耳其快速推進其國產電子戰能力。阿塞爾桑的KORAL陸基電子戰系統提供壓制敵防空功能,據稱在演習中降級印度奈基雷達網絡。此外,即將推出的Hava SOJ項目——圖薩什與阿塞爾桑聯合項目——旨在2026年前部署四架機載電子戰飛機,將土耳其頻譜能力擴展至空中領域。總體而言,這些發展表明實現電子戰主導現在需要多層次方法:地面干擾器、機載系統及北約框架內盟國互操作性——土耳其正積極追求此集成以匹配同級能力。全球與區域電子戰能力持續快速發展。實例包括:
- 俄羅斯KORAL系統:陸基移動電子戰系統,具備壓制敵防空能力,干擾范圍200公里,在敘利亞和利比亞投入作戰使用。
- 美國EA-18G咆哮者:艦載電子攻擊機,為北約部隊提供機載干擾、雷達破壞和通信拒止。
- 土耳其阿塞爾桑-土耳其航空航天工業KORAL II型:先進國產電子戰系統,具備電子支援和攻擊能力,符合北約標準。
- 土耳其Hava SOJ飛機:防區外干擾機項目,涉及四架電子戰配置龐巴迪環球6000型飛機用于機載電子戰操作,預計2026年前服役。
C.4 光纖無人機的作戰戰術
光纖系留無人機憑借其抗干擾性、光纖供電能力和延長操作時間,在現代戰場行動中日益突出。這些系統實現持久監視和電子戰操作,而無須依賴易被探測和干擾的基于射頻的通信鏈路。涉及光系無人機的關鍵作戰戰術包括:
- 周界監視:光系無人機部署在前進作戰基地上方創建實時360度監視泡,特別在夜間或電子戰環境中。
- 電子戰中繼:攜帶電子戰載荷的光系無人機可作為低空干擾中繼,在城市環境中提供射頻威脅壓制,同時因最小電磁特征保持隱蔽。
- 戰術信號情報:配備光學或射頻傳感器的光系無人機可從固定高位以高可靠性攔截、地理定位和監控對抗通信。
- 災難偵察或邊境安全:在非戰斗區,光系無人機已用于野火或越境事件的持續監控,提供不間斷電力和數據鏈路。
C.5 現場應用與使用案例
系留無人機在民用和軍事場景中展現顯著操作價值:
- 災難恢復:地震和洪水后,配備光學系纜的系留無人機用于建立韌性通信骨干。2021年arXiv研究提出基于系留無人機的5G/4G恢復系統,強調在地面基礎設施受損的災難區,持續電力和回程傳輸是關鍵使能因素。
- 智能環境與能效:《IEEE智能與機器人系統》2023研究表明,能效系留部署的系留無人機可在農業和工業環境中維持長時監視和數據中繼,具有優化視距和覆蓋性能。
- 6G背景下的混合系留通信:近期《科學報告》2025年文章提出混合部署結合光纖系留和無線無人機,在地震救援行動中維持5公里寬帶連接,8小時內實現穩定5Mbps吞吐量。
C.6 案例研究與實際部署實例
系留無人機的實際部署展示其廣泛實用應用:
- 持久監視:系統文獻綜述強調系留無人機能夠進行持續數天的不間斷監視操作,即使在低能見度或紅外受限環境中。它們已證明在關鍵基礎設施防御中有效。
- 災難通信:基于arXiv的仿真研究提出系留無人機作為可行平臺,在傳統4G/5G基礎設施不可用的災難區提供電力和數據中繼。模型顯示數小時內維持5Mbps帶寬。
- 緊急熱成像偵察:2023年MDPI研究證明耐熱系留微型無人機可有效部署在結構火災場景中測繪封閉區域,增強消防員安全和操作效率。
俄烏戰爭重新定義了現代戰爭模式,凸顯出將塑造未來沖突的關鍵戰術趨勢。荷蘭海軍陸戰隊(NLMC)轉型為瀕海突擊部隊(LRF),旨在適應這些發展以有效破壞并智取強大對手。通過采用權威研究報告與開源數據開展的廣泛案例研究,本文識別出俄烏戰爭中觀察到的五大戰術趨勢:無人系統的大規模擴散;電子戰的戰術優勢;戰場透明化;指揮控制(C2)與領導力的決定性作用;以及情報、傳感器與射手無縫整合的重要性。這五大趨勢可為兵力設計提供參考與改進方向。實用性建議優先關注該部隊發展重點,包括將情報偵察與打擊能力相整合、投資培養高技術陸戰隊員、掌握電子戰能力、持續推進指揮控制分散化、優先發展反無人機系統與欺騙戰術。這些見解確保瀕海突擊部隊發展成為高度分散且具備致命打擊能力的力量,能夠在塑造行動中發揮決定性作用。通過應用這些經驗教訓,海軍陸戰隊將提升其生存能力、作戰效能及未來沖突中的戰場塑造能力。
這是自第二次世界大戰以來大規模常規戰爭首次重返歐洲。俄烏戰爭重塑了現代戰爭形態,展現出顯著的戰場適應與創新特征。研究其經驗教訓對提升戰備水平、強化威懾能力及確保未來戰爭適應性至關重要。在烏克蘭戰事持續演進之際,荷蘭海軍陸戰隊正朝著新型部隊設計轉型。向瀕海突擊部隊的轉變從根本上改變了該部隊的作戰方式,聚焦于在拒止環境中實施塑造行動而非決戰。瀕海突擊部隊的任務是實施破壞、削弱并為后續行動創造條件。俄烏戰爭揭示了重塑現代戰爭的關鍵戰術趨勢,為海軍陸戰隊等精干敏捷部隊帶來新挑戰。這些趨勢要求部隊快速適應。隨著瀕海突擊部隊的發展,必須在應對演進威脅的同時保持破壞與智取強敵的能力。然而當前存在顯著認知缺口——如何將這些戰術趨勢轉化為海軍陸戰隊的具體變革缺乏清晰路徑。若缺乏整合這些經驗教訓的結構化方法,部隊發展可能落后于現代沖突現實。本文通過借鑒權威研究機構與開源報告的廣泛案例研究,識別俄烏戰爭中的關鍵戰術趨勢,為海軍陸戰隊部隊設計提供參考。
本研究識別出現代戰爭的五大關鍵戰術趨勢:
- 無人系統的大規模擴散:無人機徹底革新了偵察、瞄準與打擊能力。
- 電子戰的戰術優勢:電子戰不再僅是賦能能力,而是成為戰場決定性因素,能夠干擾通信、破壞傳感器并削弱武器制導。
- 戰場透明化:先進傳感器、商業衛星影像與數字化信息使隱蔽行動近乎不可能。
- 指揮控制與領導力的決定性作用:分散決策、適應能力與堅強領導是生存與成功的關鍵。
- 整合的重要性:情報、傳感器與射手需要無縫銜接,因為加速殺傷鏈是現代戰場成功的前提。
荷蘭海軍陸戰隊部隊設計展現出與俄烏戰爭五大戰術趨勢相呼應。瀕海突擊部隊在作戰全程采用無人系統,并認識到需防護敵方無人機威脅。該部隊還在偵察與通信分隊中逐步引入電子戰能力,以提升電磁頻譜感知意識。其機動理念完全基于對戰場透明化的認知,而扁平化、快速響應且靈活的指揮控制風格凸顯了俄烏戰爭趨勢的重要性。最后,整合信息、傳感器與射手是荷蘭海軍陸戰隊部隊設計的明確目標,但具體措施仍需關注。領導力與專業軍事教育的重要性構成本研究所有建議的基礎。必須首先建立適當條件才能從俄烏戰爭戰術趨勢中汲取經驗。本論文為瀕海突擊部隊提供諸多實用性建議,但需明確優先級,因為無法同時實施所有改進。
首要任務是整合情報、傳感器與射手。無縫且有彈性的殺傷鏈是在對抗性戰場空間最大化殺傷力與生存能力的關鍵。整合必須優先于零散采購,確保從精確制導火箭彈到迫擊炮與海軍水面火力的所有打擊選項都接入多層網絡化系統。
其次,瀕海突擊部隊需加大對高技術陸戰隊員的投資。在對抗性區域實施塑造行動的雄心要求陸戰隊員精通野戰技能、理解復雜系統,并具備承受現代戰爭殘酷現實的韌性。訓練計劃需要重構與延長而非壓縮或倉促進行。專業軍事教育需要重新重視并必須作為晉升強制條件。目標是使自力更生成為第二本能。
第三,必須掌握電子戰能力。海軍陸戰隊需在電子戰受限環境中訓練,建立電磁特征意識,發展電子攻擊能力,并在通信與武器制導系統中建立冗余。缺乏這些能力,所有其他能力都將變得脆弱。
第四,需要持續推動指揮控制分散化。任務式指揮必須在海軍陸戰隊各級真正落實,超越教條空話。瀕海突擊部隊無法在傳統等級指揮結構下運作,必須依賴主動性、自主性與機會捕捉能力。領導力培養必須強調信任、適應性與靈活性。
最后,應優先發展反無人機系統與欺騙戰術。無人系統定義了現代戰場,防御其威脅與運用同等重要。陸戰隊員需配備單兵反無人機能力,并快速列裝被動探測系統與分層硬殺傷解決方案。同等重要的是欺騙戰術,包括制造虛假信號特征誤導敵方偵察力量,并掌握“被誤判的藝術”。這五項基于俄烏戰爭實證且針對海軍陸戰隊部隊設計的優先事項,將確保瀕海突擊部隊成為塑造行動中的決定性力量——作為高度分散的精英作戰力量,能夠在縱深戰場空間制造破壞并為尋求區域拒止的敵人創造多重困境。

自主無人機已成為一項令人振奮的新興技術,有望徹底改變基礎設施檢測、軍事偵察與警用監控領域。然而當前絕大多數平臺存在重量大、成本高、操作難度大的問題,這限制了它們在許多任務場景中的應用——例如在人口稠密環境中,政府法規禁止重型無人機在人群附近進行自主操作。這些重量主要來自機載計算資源,這些資源是運行提供態勢感知的關鍵計算機視覺算法所必需的。本論文闡述如何通過邊緣計算在輕型無人機上實現自主性,將高計算量任務卸載至網絡近端服務器。我將論證該技術如何使自主飛行器在可接受的性能成本下更接近美國聯邦航空管理局的監管限值運行,同時揭示一種新型操作系統的設計,該系統旨在通過統一且易于編程的應用程序接口整合碎片化的無人機生態。我還將展示如何利用此技術在商用現成硬件上創建異構協同無人機集群。
無人駕駛航空器(通常稱為無人機)是一項顛覆性技術,近年來已獲得廣泛應用。在民用領域,它們可低成本安全地完成基礎設施檢測、農業監測、森林火災防控及警用監控等任務;在軍事領域,它們則是前沿偵察的重要工具。當前大多數應用場景中,無人機仍由人工飛行員全程操控。近年來研究趨勢正向全自主飛行無人機推進。美國國家標準與技術研究院將“全自主飛行”定義為“無需遠程人工飛行員干預的預編程飛行,包含響應運行時觀測數據的任務特定行動”[68]。該方法具有兩大優勢:其一可降低成本并釋放人力注意力,其二能實現無人機集群的實用化操作——即大量飛行器協同執行任務。無人機集群為諸多任務開啟新可能,有望在多個民用與軍事領域引發變革[22]。全自主無人機的關鍵驅動因素在于完成主動視覺任務[6, 93]。這類任務要求無人機根據實時場景理解做出響應,例如在場景變化前無需人工干預即下降至低空“近距離觀察”,隨后返回原高度繼續監測。此類限定范圍的任務構成了目標跟蹤與障礙規避等無人機基礎操作的特性。
重量是制約全自主無人機應用的根本障礙。更高的智能水平意味著需要更強大(因而更重)的機載計算資源與更豐富的傳感設備。以機載圖形處理器為例,其需配套散熱器、冷卻風扇與大容量電池等冗長后勤鏈條。重量增加還帶來民用區域上空的監管挑戰:自2021年起,美國聯邦航空管理局已預授權總重低于250克的無人機在人與車輛上空飛行[50]。更重的無人機需獲得該局特批,且須滿足碰撞與自由墜落緩解措施條件。即便超過此重量限值,輕量化無人機在城市環境中獲取超視距自主飛行監管批準也比重型無人機更容易。該法規已被證明是多個民用項目的主要障礙。在軍事場景中,重量同樣是關鍵考量因素——重型飛行器會增加后勤復雜度,常需專用運輸工具[73]。
自主無人機應用的其他主要限制包括軟件可移植性、可操作性、任務多樣性與單位成本。盡管已有嘗試將無人機納入統一編程生態,但目前行業常態仍是各公司為自身平臺開發專屬軟件開發工具包,這導致跨生態代碼移植困難并割裂開發者社區。現有全自主無人機還要求用戶具備豐富飛行經驗以確保安全,形成顯著的操作門檻。許多產品缺乏多功能性,無法在制造商預設的小范圍任務集外進行配置。最后,當前自主無人機單位成本是手動操控型號的數倍,這種定價損害了集群操作的經濟可行性——在集群中單機損失不僅可能發生甚至可預期。本研究的核心貢獻是SteelEagle系統:一種硬件無關的自主無人機系統,通過邊緣計算與新型模塊化自主架構突破上述障礙。邊緣計算使無人機能通過低延遲高帶寬無線網絡,將計算密集型實時操作卸載至通常位于通信基站附近的強大地面服務器(邊緣云),從而減少對重型機載計算硬件的需求。同步推出的SteelEagle操作系統設計為無人機無關、開發者友好且以任務為中心。
該系統的關鍵考量是采用商用現成[49]無人機與計算/通信載荷。該方法避免硬件定制(如無人機改裝)與特權軟件修改(如設備“越獄”),既降低成本又顯著提升可操作性,還免去重新認證需求(如美國聯邦航空管理局或聯邦通信委員會認證)。但商用現成方案也帶來新挑戰:輕型商用現成通信設備的熱限制會引發延遲、幀率與質量問題,迫使系統智能管理通信、計算與預測資源。
論文核心論點
本論文論證SteelEagle作為現有自主無人機系統的可行替代方案,盡管卸載存在固有延遲與帶寬限制。我將展示其在以下設計維度的優勢:
- 重量:飛行器總重(含電池與載荷)
- 可操作性:飛行器的操作入門門檻
- 多功能性:系統可執行任務的多樣性
- 可移植性:系統適配新硬件的便捷度
- 成本:飛行器總成本(含電池與載荷)
基于純商用現成無人機與商用現成計算/通信載荷構建超輕型飛行平臺,用于超視距場景下的自主主動視覺任務是可行的。實現該目標的最大障礙(即實現自主性所需計算硬件的重量)可通過邊緣計算克服。我認為此類飛行平臺能模擬重型自主無人機在主動視覺任務上的性能表現,盡管面臨帶寬、延遲與連接性挑戰。
該論點的重要性在于:若成立,則此類支持邊緣計算的無人機將在城市環境超視距任務中獲得廣泛應用,相比傳統自主無人機具有更低運營成本與更高安全性。建筑檢測、警用監控與交通監測等任務將直接受益,公共基礎設施上空的無人機集群也將更安全。
其非平凡性在于:該領域現有研究有限,因當前工作多聚焦提升無人機能力而非減輕重量。目前尚無低于美國聯邦航空管理局250克限重、具備自主執行任務機載智能的商用無人機。現有支持邊緣計算的無人機數量有限,且均重量過大(超500克)價格昂貴(超3000美元)。雖有學術研究探索無人機與邊緣計算結合(詳見3.2節),但這些研究針對大型重型無人機,其在使用邊緣卸載的同時仍依賴機載硬件,且未將重量作為主導設計考量。相比之下,SteelEagle主要圍繞不減損性能的重量削減進行設計,我相信這對推動自主無人機大規模應用至關重要。
本文主要貢獻如下:
- 闡述基于邊緣計算在輕型商用現成無人機上執行主動視覺任務的全自主飛行平臺,論證其在重量、可操作性、多功能性、可移植性與成本方面對先前工作的改進。
- 通過新型基準測試套件量化該平臺性能的測量研究。
- 展示該平臺如何擴展至異構無人機集群生態。
論文結構概覽
本論文后續章節安排如下: ? 第二章提供自主無人機發展史背景并綜述相關研究,說明SteelEagle如何基于現有研究構建。 ? 第三章討論如何將輕型商用現成無人機連接至邊緣,闡述設計挑戰并制定機載邊緣通信載荷的選型標準。 ? 第四章提供SteelEagle整體設計,包括其相對于現有系統的優勢與不足,演示SteelEagle無人機執行多項自主任務并進行性能分析。 ? 第五章介紹改進早期原型的新型邊緣通信載荷,展示該載荷如何縮短系統“觀察-判斷-決策-行動”循環周期,從而顯著提升自主性能。 ? 第六章描述用于測量基于邊緣與全機載自主無人機關鍵任務性能的基準測試系列,這些測試聚焦給定平臺的“觀察-判斷-決策-行動”循環,有助于理解高延遲與低吞吐量對邊緣卸載的影響。 ? 第七章通過基于驅動的方法展示SteelEagle如何部署于多樣化的無人機硬件與控制方案,說明系統適配新無人機的過程并為斷聯操作奠定基礎。 ? 第八章總結論文貢獻并展望未來工作方向。
過去數年間,全球安全環境已發生冷戰結束后世界秩序中曾被視為不可想象的變革。美國國防部曾認為未來戰爭形態將以反恐與有限應急行動為主,而今認為與地區級對手展開大規模作戰的可能性遠超既往認知。近年來,俄羅斯發動了歐洲過去八十年來最大規模的地面戰爭。俄羅斯及其他地區級對手投入巨資發展并展示強大能力,可挑戰美國在網絡空間與電磁頻譜等多領域的主導地位。美陸軍多域作戰理念預見到大國競爭與大規模作戰行動的回歸,強調需要整合并匯聚所有領域的作戰能力以獲取并鞏固相對優勢地位。與此同時,陸軍最新信息條令為軍事背景下如何看待信息提供了新范式。數據與信息是指揮控制的核心要素。傳感器、網絡技術與全球互聯技術的進步為指揮官提供了空前規模的數據與信息以支持決策制定。這些能力幾乎完全依賴于網絡空間與電磁頻譜。同級威脅持續嘗試滲透、利用并削弱友軍網絡與數據的訪問及使用能力。因此不僅需保護自身信息與網絡空間能力,更須剝奪對手使用類似能力的機會。
本野戰手冊3-12嵌套并支持網絡空間作戰聯合條令、聯合電磁頻譜作戰條令以及更高層級的陸軍條令。為理解并運用本出版物中的條令,讀者應熟悉陸軍作戰條令(ADP 3-0與FM 3-0)及ADP 3-13所述信息優勢框架。本手冊主要面向戰區陸軍及以下層級指揮機構與參謀人員,次要受眾為網絡與電磁戰專業人員。擔任聯合特遣部隊或多國部隊指揮部的陸軍總部指揮機構與參謀人員還應參考關于競爭連續體及聯合或多國部隊的相關聯合或多國條令。全陸軍范圍的訓練與教育機構亦將使用本出版物。
本野戰手冊3-12作為合成作戰手段的組成部分,為達成競爭連續體目標提供網絡空間作戰、電磁戰及網絡空間電磁活動的陸軍條令。本手冊使指揮機構與參謀人員理解陸軍網絡空間作戰、電磁戰、網絡空間電磁活動、參謀職責以及軍級以上支持網絡空間與電磁戰作戰的組織層級。本手冊闡述實施網絡空間電磁活動的人員如何規劃、整合與同步網絡空間及電磁戰作戰,以及網絡空間電磁活動科如何通過各類整合流程與工作組在作戰過程中與其他參謀科協同。
本野戰手冊3-12共含五章與九個附錄:
? 第一章-概述與威脅:開篇闡述作為合成作戰組成部分的網絡空間與電磁戰背景,繼而討論威脅與脆弱性,最后論述支持目標選定與防護規劃的系統分析。
? 第二章-網絡空間作戰:描述網絡空間不同部分如何由不同實體控制運營而用戶依賴其既不控制也不運營的系統,進而討論陸軍部隊如何防護威脅利用網絡空間并保持己方使用能力,最終闡釋基于對網絡空間依賴的空域與陸域網絡空間攻防作戰實施。
? 第三章-電磁戰:介紹電磁戰及其符合聯合條令的職能劃分,進而討論電磁攻擊、電磁防護、電磁支持與電磁戰重編程在陸軍作戰中的應用,隨后闡述電磁戰與互補信號情報能力的同步協調,最后描述軍級及以下建制電磁戰部隊編成。
? 第四章-網絡空間電磁活動:闡述通過作戰流程(規劃、準備、實施與評估)將網絡空間與電磁戰作戰整合同步至合成作戰體系,以及網絡空間電磁活動科在目標選定中的職能,最終討論與聯合部隊的整合。
? 第五章-合成作戰中的網絡空間與電磁戰作戰:論述網絡空間與電磁戰作戰在合成作戰手段中的貢獻,開篇討論目標選定、能力匯聚與聯合部隊整合,繼而分析網絡空間與電磁戰作戰在整個競爭連續體中的貢獻值。
? 附錄A-網絡事件響應:界定網絡事件類型與嚴重等級,以及向上級機構與聯合部隊當局報告網絡事件的流程與程序。
? 附錄B-網絡空間電磁活動規劃與整合:論述網絡空間電磁活動科在軍事決策流程與整合流程中的職能。
? 附錄C-效果請求:介紹網絡效果請求格式、電磁攻擊請求格式與聯合戰術空襲請求的表格制式與填報說明。
? 附錄D-識別與應對電磁攻擊與惡意網絡空間活動:闡述對抗環境中識別與克服威脅惡意網絡空間活動及電磁攻擊的方法,包括對手威脅戰術技程序概述以及預防、識別與反制威脅電磁攻擊與惡意網絡空間活動的措施。
? 附錄E-報文格式:提供各類電磁戰報文的制式規范與編發說明。
? 附錄F-軍級以上網絡與電磁戰組織:論述實施或支持網絡空間與電磁戰作戰的國家級、國防部與預備役組成部分組織體系,同時概述美國網絡司令部及其下屬通過網絡任務部隊向陸軍指揮官提供網絡空間作戰與電磁戰支持的聯合組織機構。
? 附錄G-訓練:討論為塑造作戰環境、預防沖突與支持應對同級威脅的大規模作戰而實施的訓練準備,包括院校培訓、駐地訓練、戰斗訓練中心輪訓與部署演訓。
? 附錄H-網絡加固指南:為部隊提供基于風險的網絡安全態勢評估指南以實現更安全網絡,圍繞四個獨立但關聯領域組織本地網絡加固流程:? 域管理與安全 ? 網絡設備管理與安全 ? 網絡流量監控與告警 ? 終端(主機與服務器)安全。
? 附錄I-陸軍綜合重編程周期:界定未來陸軍重編程體系的發展方向。